 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSustainable Transfer Learning for Adaptive Robot Skills
Apr 08, 2026Learning robot skills from scratch is often time-consuming, while reusing data promotes sustainability and improves sample efficiency. This study investigates policy transfer across different robotic platforms, focusing on peg-in-hole task using reinforcement learning (RL). Policy training is carried out on two different robots. Their policies are transferred and evaluated for zero-shot, fine-tuning, and training from scratch. Results indicate that zero-shot transfer leads to lower success rates and relatively longer task execution times, while fine-tuning significantly improves performance with fewer training time-steps. These findings highlight that policy transfer with adaptation techniques improves sample efficiency and generalization, reducing the need for extensive retraining and supporting sustainable robotic learning.
* Published in RAAD 2025 (Springer). 7 pages, 5 figures
Dynamic collision avoidance for multiple robotic manipulators based on a non-cooperative multi-agent game
Feb 28, 2021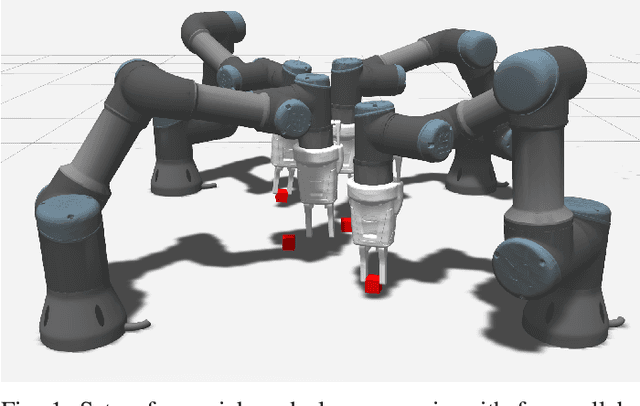
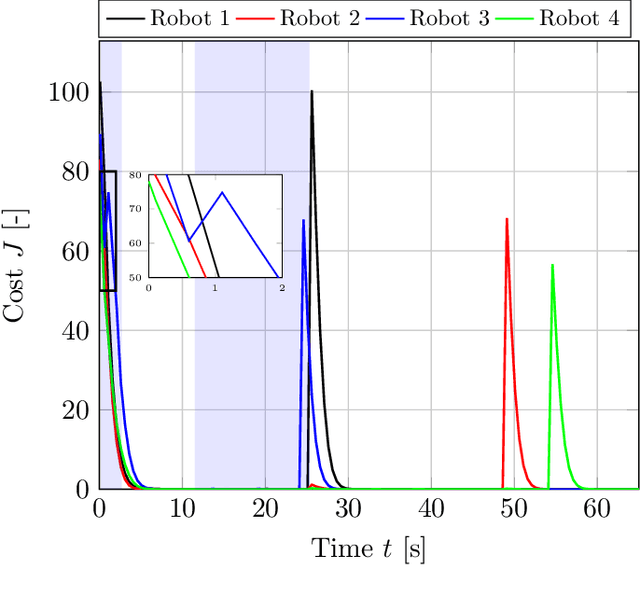
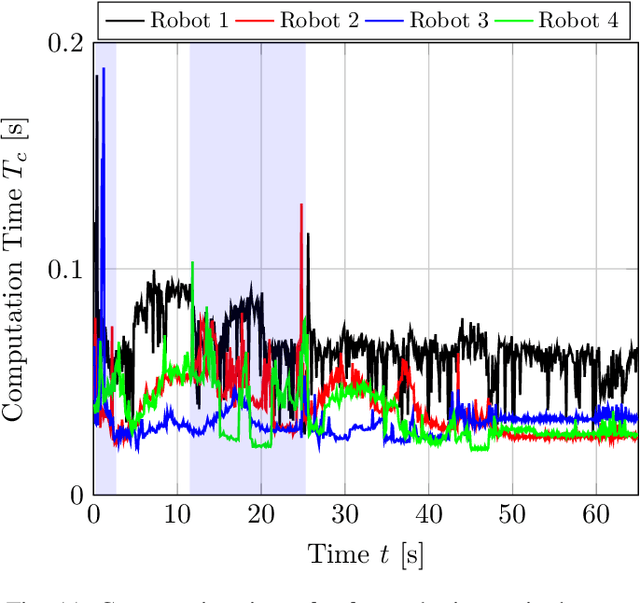
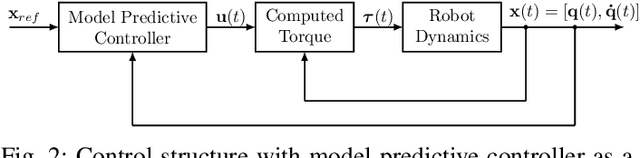
A flexible operation of multiple robotic manipulators in a shared workspace requires an online trajectory planning with static and dynamic collision avoidance. In this work, we propose a real-time capable motion control algorithm, based on non-linear model predictive control, which accounts for static and dynamic collision avoidance. The proposed algorithm is formulated as a non-cooperative game, where each robot is considered as an agent. Each agent optimizes its own motion and accounts for the predicted movement of surrounding agents. We propose a novel approach to formulate the dynamic collision constraints. Additionally, we account for deadlocks that might occur in a setup of multiple robotic manipulators. We validate our algorithm on a pick and place scenario for four collaborative robots operating in a common workspace in the simulation environment Gazebo. The robots are controlled by the Robot Operating System (ROS). We demonstrate, that our approach is real-time capable and, due to the distributed nature of the approach, easily scales to an arbitrary number of robot manipulators in a shared workspace.
Flatness Based Control of an Industrial Robot Joint Using Secondary Encoders
Jan 13, 2021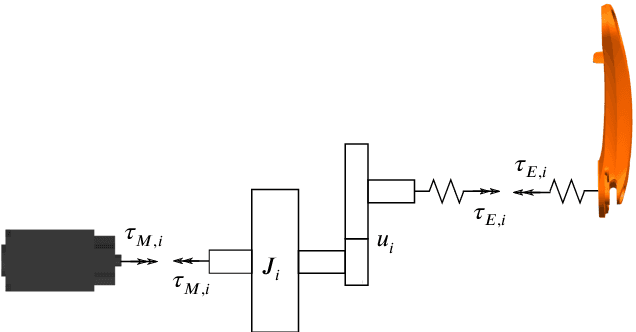
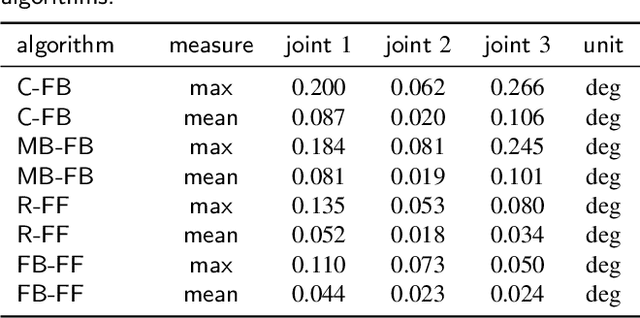
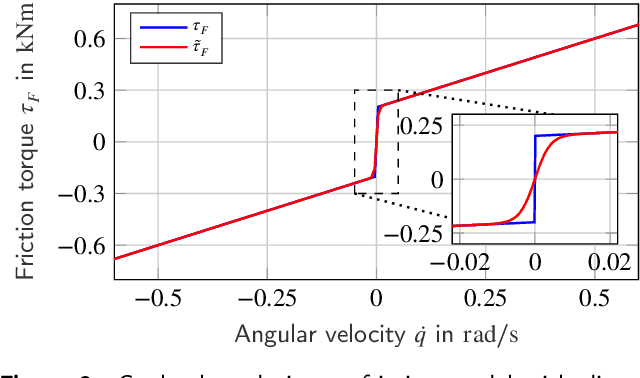
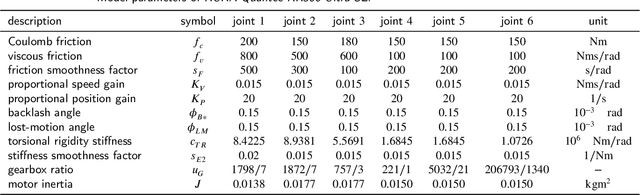
Due to their compliant structure, industrial robots without precision-enhancing measures are only to a limited extent suitable for machining applications. Apart from structural, thermal and bearing deformations, the main cause for compliant structure is backlash of transmission drives. This paper proposes a method to improve trajectory tracking accuracy by using secondary encoders and applying a feedback and a flatness based feed forward control strategy. For this purpose, a novel nonlinear, continuously differentiable dynamical model of a flexible robot joint is presented. The robot joint is modeled as a two-mass oscillator with pose-dependent inertia, nonlinear friction and nonlinear stiffness, including backlash. A flatness based feed forward control is designed to improve the guiding behaviour and a feedback controller, based on secondary encoders, is implemented for disturbance compensation. Using Automatic Differentiation, the nonlinear feed forward controller can be computed in a few microseconds online. Finally, the proposed algorithms are evaluated in simulations and experimentally on a real KUKA Quantec KR300 Ultra SE.