 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-Driven 3D Scene Generation of Agricultural Simulation Environments
Feb 12, 2026Procedural generation techniques in 3D rendering engines have revolutionized the creation of complex environments, reducing reliance on manual design. Recent approaches using Large Language Models (LLMs) for 3D scene generation show promise but often lack domain-specific reasoning, verification mechanisms, and modular design. These limitations lead to reduced control and poor scalability. This paper investigates the use of LLMs to generate agricultural synthetic simulation environments from natural language prompts, specifically to address the limitations of lacking domain-specific reasoning, verification mechanisms, and modular design. A modular multi-LLM pipeline was developed, integrating 3D asset retrieval, domain knowledge injection, and code generation for the Unreal rendering engine using its API. This results in a 3D environment with realistic planting layouts and environmental context, all based on the input prompt and the domain knowledge. To enhance accuracy and scalability, the system employs a hybrid strategy combining LLM optimization techniques such as few-shot prompting, Retrieval-Augmented Generation (RAG), finetuning, and validation. Unlike monolithic models, the modular architecture enables structured data handling, intermediate verification, and flexible expansion. The system was evaluated using structured prompts and semantic accuracy metrics. A user study assessed realism and familiarity against real-world images, while an expert comparison demonstrated significant time savings over manual scene design. The results confirm the effectiveness of multi-LLM pipelines in automating domain-specific 3D scene generation with improved reliability and precision. Future work will explore expanding the asset hierarchy, incorporating real-time generation, and adapting the pipeline to other simulation domains beyond agriculture.
EchoPT: A Pretrained Transformer Architecture that Predicts 2D In-Air Sonar Images for Mobile Robotics
May 21, 2024



The predictive brain hypothesis suggests that perception can be interpreted as the process of minimizing the error between predicted perception tokens generated by an internal world model and actual sensory input tokens. When implementing working examples of this hypothesis in the context of in-air sonar, significant difficulties arise due to the sparse nature of the reflection model that governs ultrasonic sensing. Despite these challenges, creating consistent world models using sonar data is crucial for implementing predictive processing of ultrasound data in robotics. In an effort to enable robust robot behavior using ultrasound as the sole exteroceptive sensor modality, this paper introduces EchoPT, a pretrained transformer architecture designed to predict 2D sonar images from previous sensory data and robot ego-motion information. We detail the transformer architecture that drives EchoPT and compare the performance of our model to several state-of-the-art techniques. In addition to presenting and evaluating our EchoPT model, we demonstrate the effectiveness of this predictive perception approach in two robotic tasks.
Cosys-AirSim: A Real-Time Simulation Framework Expanded for Complex Industrial Applications
Mar 28, 2023



Within academia and industry, there has been a need for expansive simulation frameworks that include model-based simulation of sensors, mobile vehicles, and the environment around them. To this end, the modular, real-time, and open-source AirSim framework has been a popular community-built system that fulfills some of those needs. However, the framework required adding systems to serve some complex industrial applications, including designing and testing new sensor modalities, Simultaneous Localization And Mapping (SLAM), autonomous navigation algorithms, and transfer learning with machine learning models. In this work, we discuss the modification and additions to our open-source version of the AirSim simulation framework, including new sensor modalities, vehicle types, and methods to generate realistic environments with changeable objects procedurally. Furthermore, we show the various applications and use cases the framework can serve.
Physical LiDAR Simulation in Real-Time Engine
Aug 23, 2022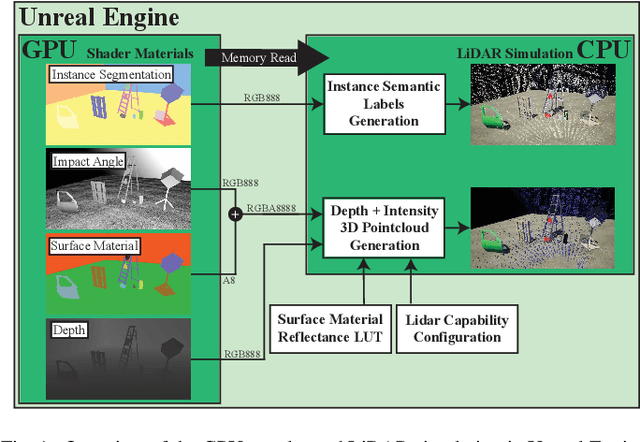
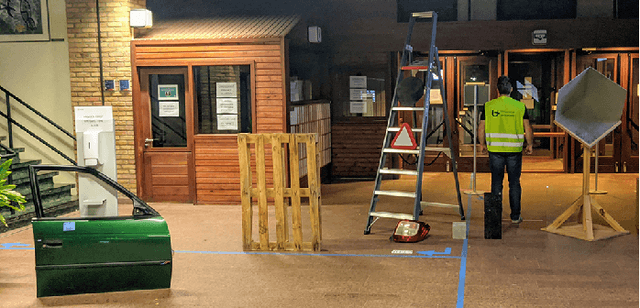
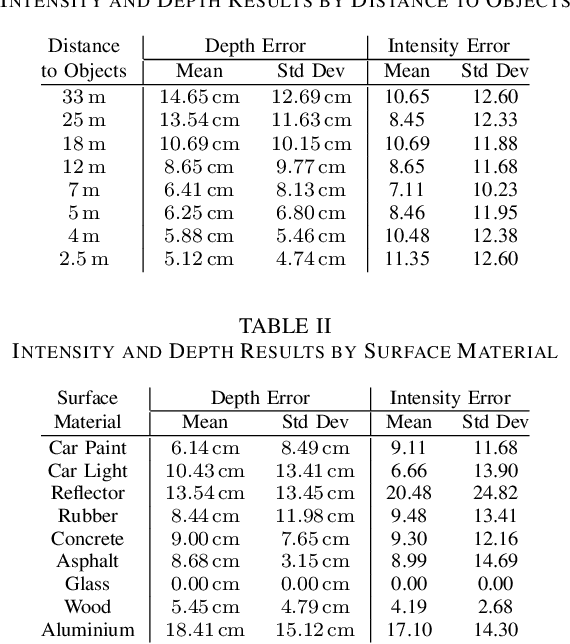
Designing and validating sensor applications and algorithms in simulation is an important step in the modern development process. Furthermore, modern open-source multi-sensor simulation frameworks are moving towards the usage of video-game engines such as the Unreal Engine. Simulation of a sensor such as a LiDAR can prove to be difficult in such real-time software. In this paper we present a GPU-accelerated simulation of LiDAR based on its physical properties and interaction with the environment. We provide a generation of the depth and intensity data based on the properties of the sensor as well as the surface material and incidence angle at which the light beams hit the surface. It is validated against a real LiDAR sensor and shown to be accurate and precise although highly depended on the spectral data used for the material properties.