 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Petri Nets for Context-Adaptive Robot Explanations
Sep 17, 2025In human-robot interaction, robots must communicate in a natural and transparent manner to foster trust, which requires adapting their communication to the context. In this paper, we propose using Petri nets (PNs) to model contextual information for adaptive robot explanations. PNs provide a formal, graphical method for representing concurrent actions, causal dependencies, and system states, making them suitable for analyzing dynamic interactions between humans and robots. We demonstrate this approach through a scenario involving a robot that provides explanations based on contextual cues such as user attention and presence. Model analysis confirms key properties, including deadlock-freeness, context-sensitive reachability, boundedness, and liveness, showing the robustness and flexibility of PNs for designing and verifying context-adaptive explanations in human-robot interactions.
Reinforcement Learning Approaches in Social Robotics
Sep 21, 2020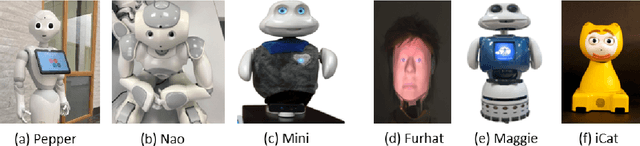
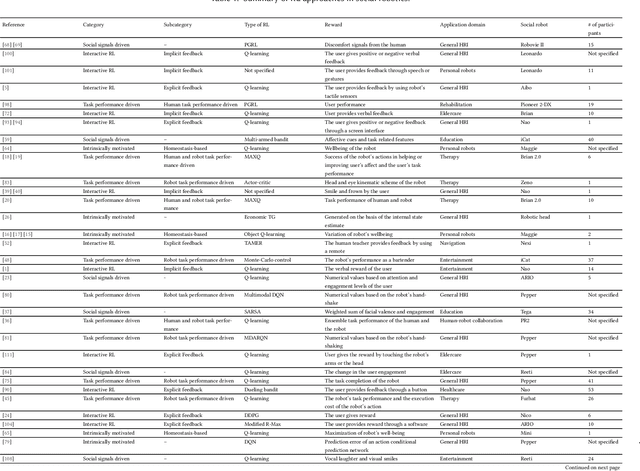
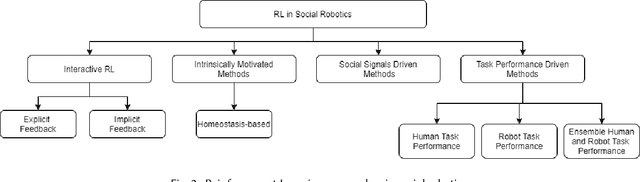
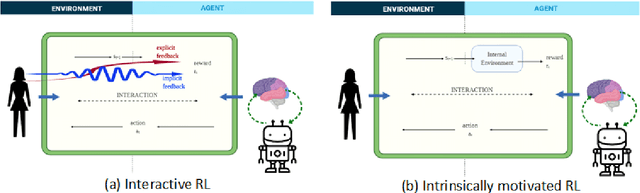
There is a growing body of literature that formulates social human-robot interactions as sequential decision-making tasks. In such cases, reinforcement learning arises naturally since the interaction is a key component in both reinforcement learning and social robotics. This article surveys reinforcement learning approaches in social robotics. We propose a taxonomy that categorizes reinforcement learning methods in social robotics according to the nature of the reward function. We discuss the benefits and challenges of such methods and outline possible future directions.