 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe compressible Neural Particle Method for Simulating Compressible Viscous Fluid Flows
Aug 23, 2025



Particle methods play an important role in computational fluid dynamics, but they are among the most difficult to implement and solve. The most common method is smoothed particle hydrodynamics, which is suitable for problem settings that involve large deformations, such as tsunamis and dam breaking. However, the calculation can become unstable depending on the distribution of particles. In contrast, the neural particle method has high computational stability for various particle distributions is a machine learning method that approximates velocity and pressure in a spatial domain using neural networks. The neural particle method has been extended to viscous flows, but until now it has been limited to incompressible flows. In this paper, we propose the compressible neural particle method, which is a new feed-forward neural network-based method that extends the original neural particle method to model compressible viscous fluid flows. The proposed method uses neural networks to calculate the velocity and pressure of fluid particles at the next time step, and the Tait equation to calculate the density to handle the compressibility. The loss function is composed of the governing equations of compressible flow and the boundary conditions, which are free surface and solid boundary conditions. We demonstrate that the proposed method can accurately solve the compressible viscous fluid flow, a problem that was difficult to solve with the smoothed particle hydrodynamics method, by applying it to a dam breaking problem.
Autonomous optical navigation for DESTINY+: Enhancing misalignment robustness in flyby observations with a rotating telescope
Apr 02, 2025



DESTINY+ is an upcoming JAXA Epsilon medium-class mission to flyby multiple asteroids including Phaethon. As an asteroid flyby observation instrument, a telescope mechanically capable of single-axis rotation, named TCAP, is mounted on the spacecraft to track and observe the target asteroids during flyby. As in past flyby missions utilizing rotating telescopes, TCAP is also used as a navigation camera for autonomous optical navigation during the closest-approach phase. To mitigate the degradation of the navigation accuracy, past missions performed calibration of the navigation camera's alignment before starting optical navigation. However, such calibration requires significant operational time to complete and imposes constraints on the operation sequence. From the above background, the DESTINY+ team has studied the possibility of reducing operational costs by allowing TCAP alignment errors to remain. This paper describes an autonomous optical navigation algorithm robust to the misalignment of rotating telescopes, proposed in this context. In the proposed method, the misalignment of the telescope is estimated simultaneously with the spacecraft's orbit relative to the flyby target. To deal with the nonlinearity between the misalignment and the observation value, the proposed method utilizes the unscented Kalman filter, instead of the extended Kalman filter widely used in past studies. The proposed method was evaluated with numerical simulations on a PC and with hardware-in-the-loop simulation, taking the Phaethon flyby in the DESTINY+ mission as an example. The validation results suggest that the proposed method can mitigate the misalignment-induced degradation of the optical navigation accuracy with reasonable computational costs suited for onboard computers.
A Prefixed Patch Time Series Transformer for Two-Point Boundary Value Problems in Three-Body Problems
Apr 02, 2025



Two-point boundary value problems for cislunar trajectories present significant challenges in circler restricted three body problem, making traditional analytical methods like Lambert's problem inapplicable. This study proposes a novel approach using a prefixed patch time series Transformer model that automates the solution of two-point boundary value problems from lunar flyby to arbitrary terminal conditions. Using prefix tokens of terminal conditions in our deep generative model enables solving boundary value problems in three-body dynamics. The training dataset consists of trajectories obtained through forward propagation rather than solving boundary value problems directly. The model demonstrates potential practical utility for preliminary trajectory design in cislunar mission scenarios.
Asteroid Flyby Cycler Trajectory Design Using Deep Neural Networks
Nov 23, 2021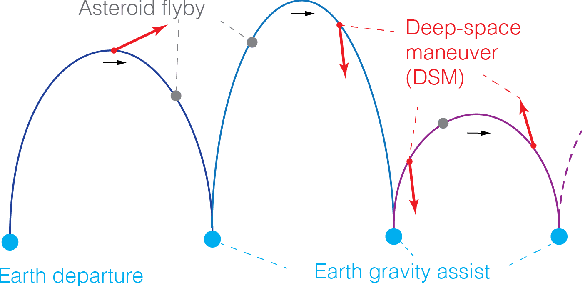

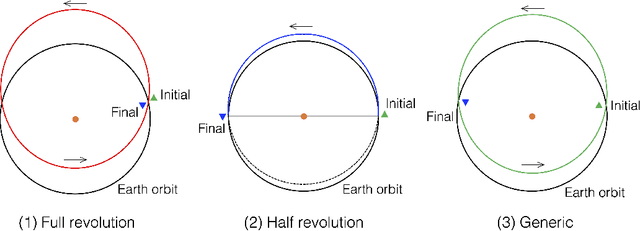
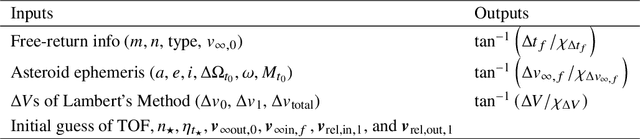
Asteroid exploration has been attracting more attention in recent years. Nevertheless, we have just visited tens of asteroids while we have discovered more than one million bodies. As our current observation and knowledge should be biased, it is essential to explore multiple asteroids directly to better understand the remains of planetary building materials. One of the mission design solutions is utilizing asteroid flyby cycler trajectories with multiple Earth gravity assists. An asteroid flyby cycler trajectory design problem is a subclass of global trajectory optimization problems with multiple flybys, involving a trajectory optimization problem for a given flyby sequence and a combinatorial optimization problem to decide the sequence of the flybys. As the number of flyby bodies grows, the computation time of this optimization problem expands maliciously. This paper presents a new method to design asteroid flyby cycler trajectories utilizing a surrogate model constructed by deep neural networks approximating trajectory optimization results. Since one of the bottlenecks of machine learning approaches is to generate massive trajectory databases, we propose an efficient database generation strategy by introducing pseudo-asteroids satisfying the Karush-Kuhn-Tucker conditions. The numerical result applied to JAXA's DESTINY+ mission shows that the proposed method can significantly reduce the computational time for searching asteroid flyby sequences.