 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSSD-Faster Net: A Hybrid Network for Industrial Defect Inspection
Jul 03, 2022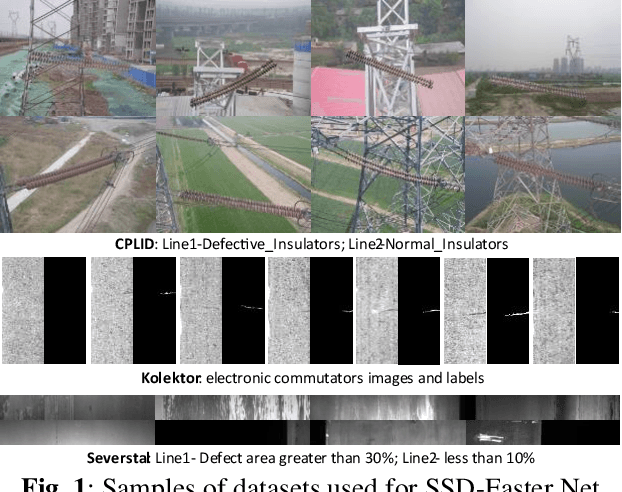
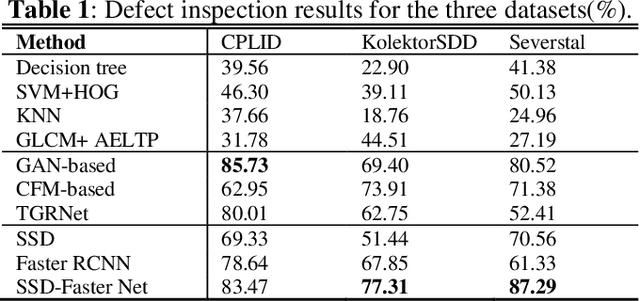
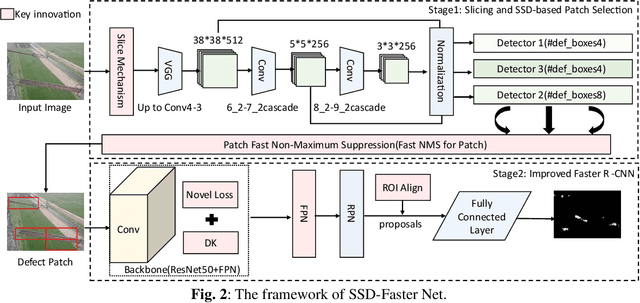
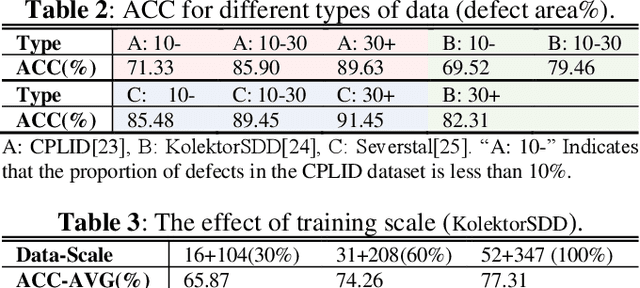
The quality of industrial components is critical to the production of special equipment such as robots. Defect inspection of these components is an efficient way to ensure quality. In this paper, we propose a hybrid network, SSD-Faster Net, for industrial defect inspection of rails, insulators, commutators etc. SSD-Faster Net is a two-stage network, including SSD for quickly locating defective blocks, and an improved Faster R-CNN for defect segmentation. For the former, we propose a novel slice localization mechanism to help SSD scan quickly. The second stage is based on improved Faster R-CNN, using FPN, deformable kernel(DK) to enhance representation ability. It fuses multi-scale information, and self-adapts the receptive field. We also propose a novel loss function and use ROI Align to improve accuracy. Experiments show that our SSD-Faster Net achieves an average accuracy of 84.03%, which is 13.42% higher than the nearest competitor based on Faster R-CNN, 4.14% better than GAN-based methods, more than 10% higher than that of DNN-based detectors. And the computing speed is improved by nearly 7%, which proves its robustness and superior performance.
UTD-Yolov5: A Real-time Underwater Targets Detection Method based on Attention Improved YOLOv5
Jul 02, 2022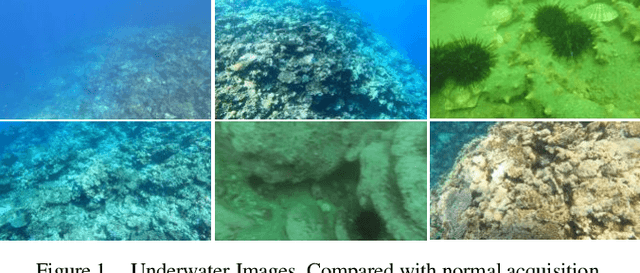
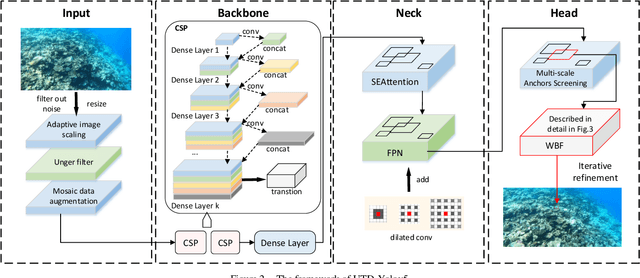
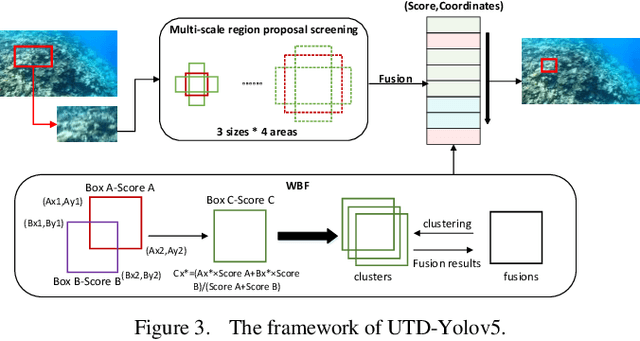
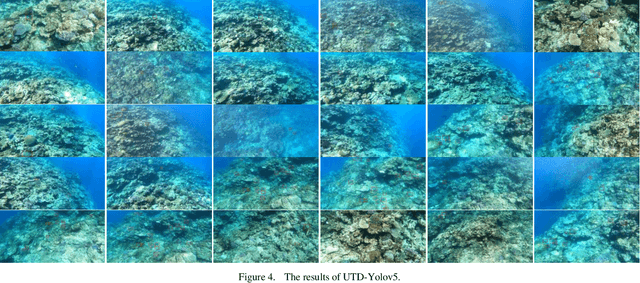
As the treasure house of nature, the ocean contains abundant resources. But the coral reefs, which are crucial to the sustainable development of marine life, are facing a huge crisis because of the existence of COTS and other organisms. The protection of society through manual labor is limited and inefficient. The unpredictable nature of the marine environment also makes manual operations risky. The use of robots for underwater operations has become a trend. However, the underwater image acquisition has defects such as weak light, low resolution, and many interferences, while the existing target detection algorithms are not effective. Based on this, we propose an underwater target detection algorithm based on Attention Improved YOLOv5, called UTD-Yolov5. It can quickly and efficiently detect COTS, which in turn provides a prerequisite for complex underwater operations. We adjusted the original network architecture of YOLOv5 in multiple stages, including: replacing the original Backbone with a two-stage cascaded CSP (CSP2); introducing the visual channel attention mechanism module SE; designing random anchor box similarity calculation method etc. These operations enable UTD-Yolov5 to detect more flexibly and capture features more accurately. In order to make the network more efficient, we also propose optimization methods such as WBF and iterative refinement mechanism. This paper conducts a lot of experiments based on the CSIRO dataset [1]. The results show that the average accuracy of our UTD-Yolov5 reaches 78.54%, which is a great improvement compared to the baseline.