 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid LSTM-UKF Framework: Ankle Angle and Ground Reaction Force Estimation
Jan 10, 2026Accurate prediction of joint kinematics and kinetics is essential for advancing gait analysis and developing intelligent assistive systems such as prosthetics and exoskeletons. This study presents a hybrid LSTM-UKF framework for estimating ankle angle and ground reaction force (GRF) across varying walking speeds. A multimodal sensor fusion strategy integrates force plate data, knee angle, and GRF signals to enrich biomechanical context. Model performance was evaluated using RMSE and $R^2$ under subject-specific validation. The LSTM-UKF consistently outperformed standalone LSTM and UKF models, achieving up to 18.6\% lower RMSE for GRF prediction at 3 km/h. Additionally, UKF integration improved robustness, reducing ankle angle RMSE by up to 22.4\% compared to UKF alone at 1 km/h. These results underscore the effectiveness of hybrid architectures for reliable gait prediction across subjects and walking conditions.
A new state estimation approach-Adaptive Fading Cubature Kalman filter
Aug 25, 2021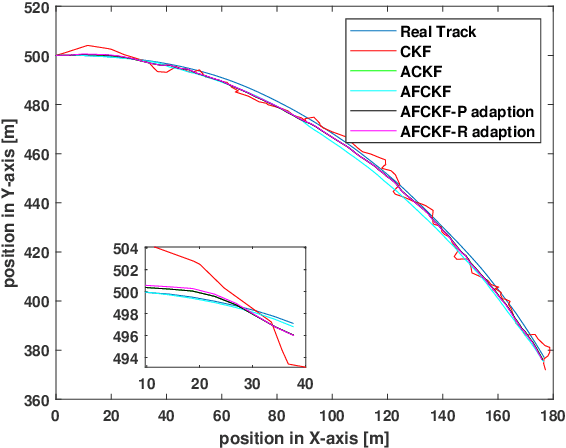
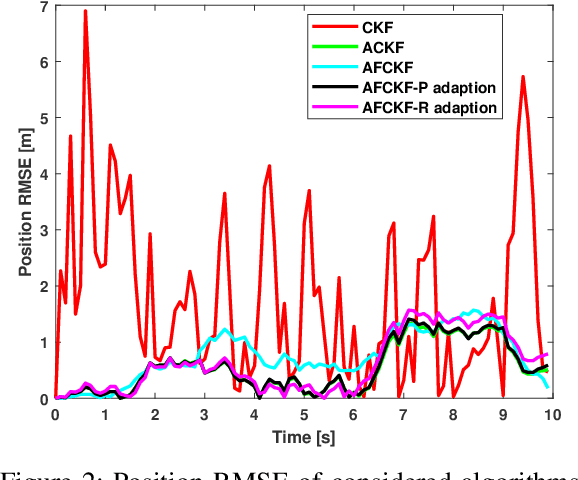
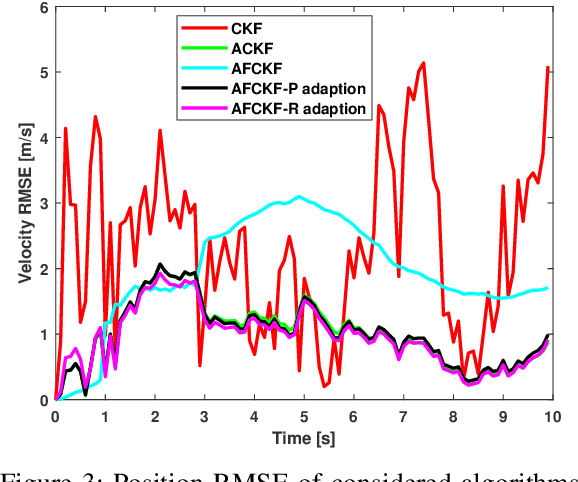
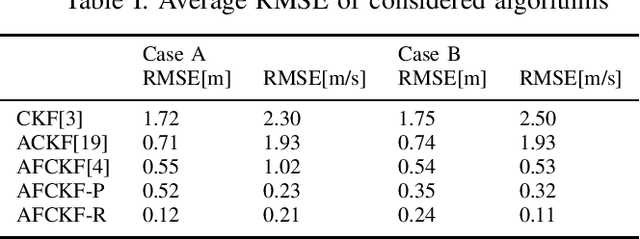
This paper presents a novel adaptive fading cubature Kalman filter (AFCKF) based on double transitive factors. The developed adaptive algorithm is explained in two stages; stage (i) a single transitive factor is used to update the predicted state error covariance, ${\bf \hat P_{k}}^{-}$ based on innovation or residual vector, whereas, in stage (ii), the measurement noise covariance matrix, ${\bf \hat R_{k}^{*}}$ is scaled by another transitive factor. Furthermore, showing the proof concept for estimation of the process noise, ${\bf \hat Q_{k}^{*}}$ and measurement noise covariance matrices by combining the innovation and residual vector in the AFCKF algorithm. It can provide reliable state estimation in the presence of unknown noise statistics. Bench-marking target tracking example is considered to show the performance improvement of the developed algorithms. As compared with existing adaptive approaches, the proposed fading algorithm can provide better estimation results.
Covariance Matching based robust Adaptive Cubature Kalman Filter
Jun 20, 2021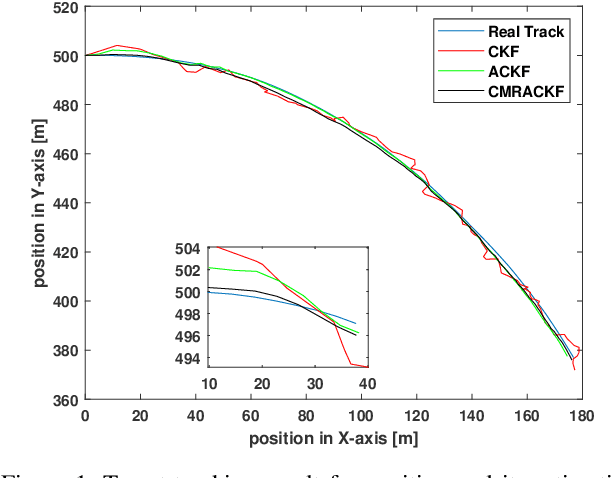
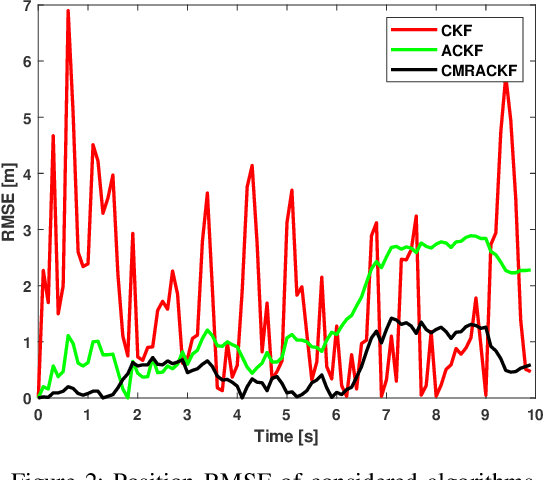
This letter explores covariance matching-based adaptive robust cubature Kalman filter (CMRACKF). In this method, the innovation sequence is used to determine the covariance matrix of measurement noise that can overcome the limitation of conventional CKF. In the proposed algorithm, weights are adaptively adjusted and used for updating the measurement noise covariance matrices online. It can also enhance the adaptive capability of the ACKF. The simulation results are illustrated to evaluate the performance of the proposed algorithm.
* 4 pages, 2 figures
Windowing and random weighting based cubature RTS smoothing for target tracking
Jun 20, 2021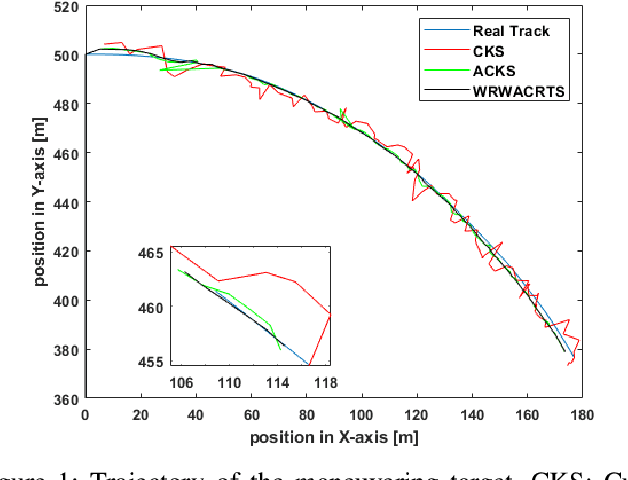
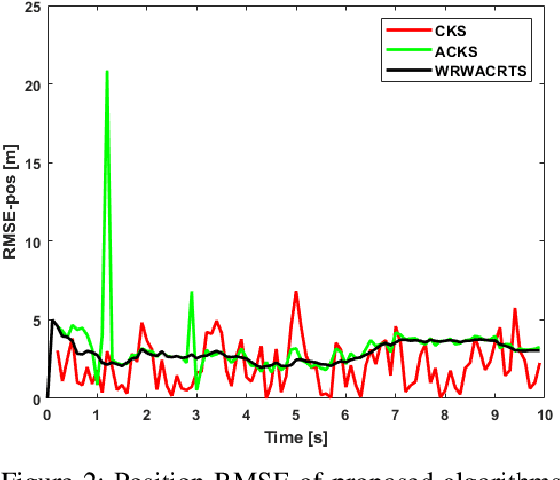
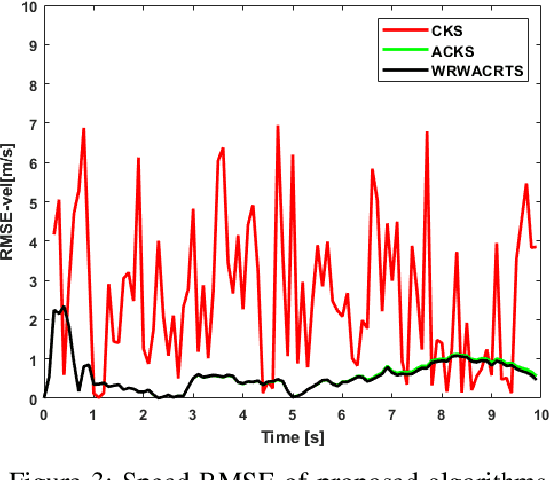
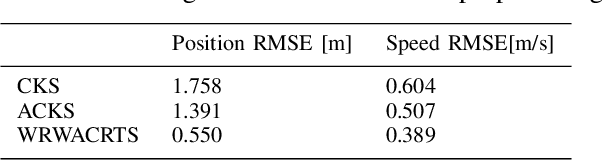
This paper presents windowing and random weighting (WRW) based adaptive cubature Rauch Tung Striebel (CRTS) smoother (WRWACRTS). The Unscented KF (WRWUKF) has already existed as an alternative to nonlinear smoothing solutions. In the proposed method, both windowing and random weighted estimation methods are combined together and used to estimate the noise statistics. Subsequently, the weights of each window are adjusting randomly, and update the process and measurement noise covariances matrices at each epoch. The developed WRWACRTS algorithm overcomes the limitation of the conventional CKS. The Lyapunov function-based approach is used to investigate the convergence proof of the WRWACRTS algorithm. A numerical example is shown to demonstrate the performance of the proposed algorithm.