 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature Extraction of ECG Signal Using HHT Algorithm
Mar 07, 2014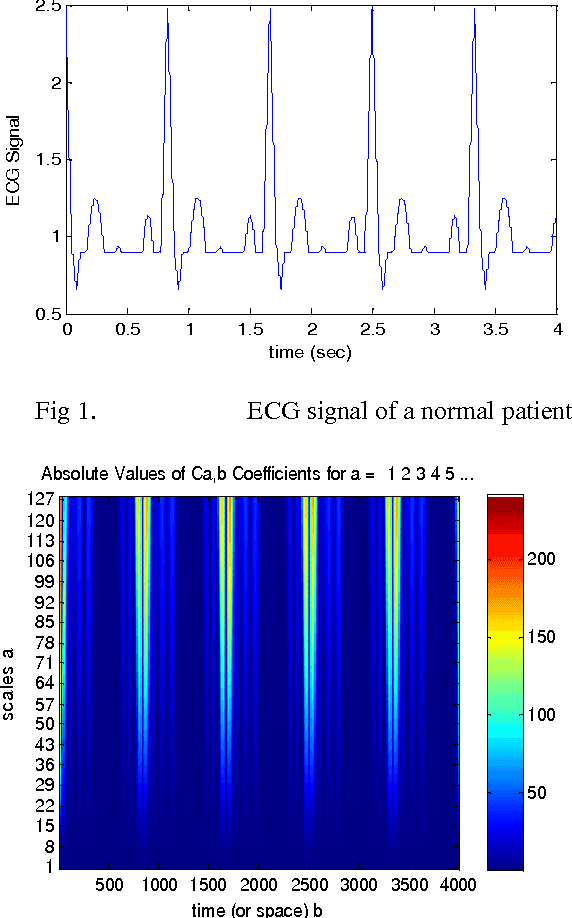
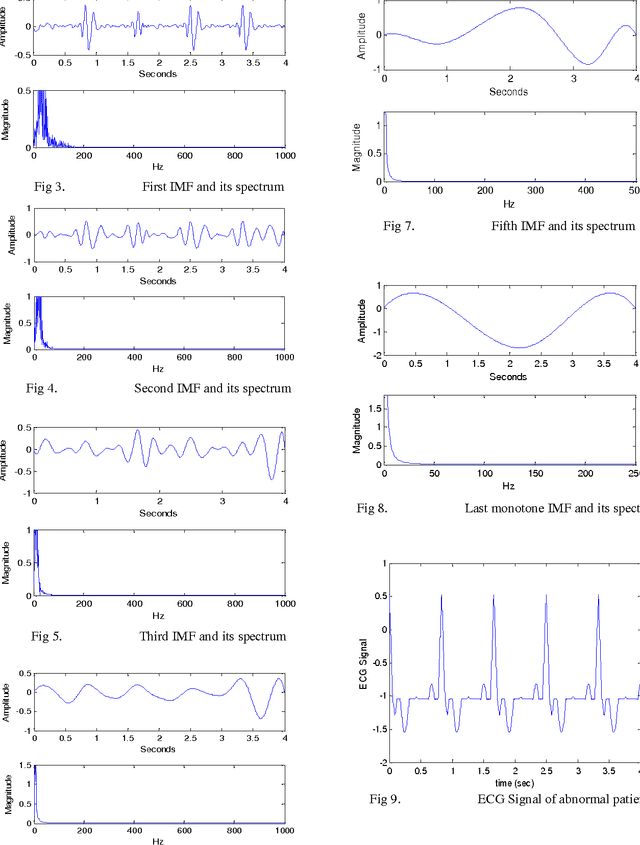
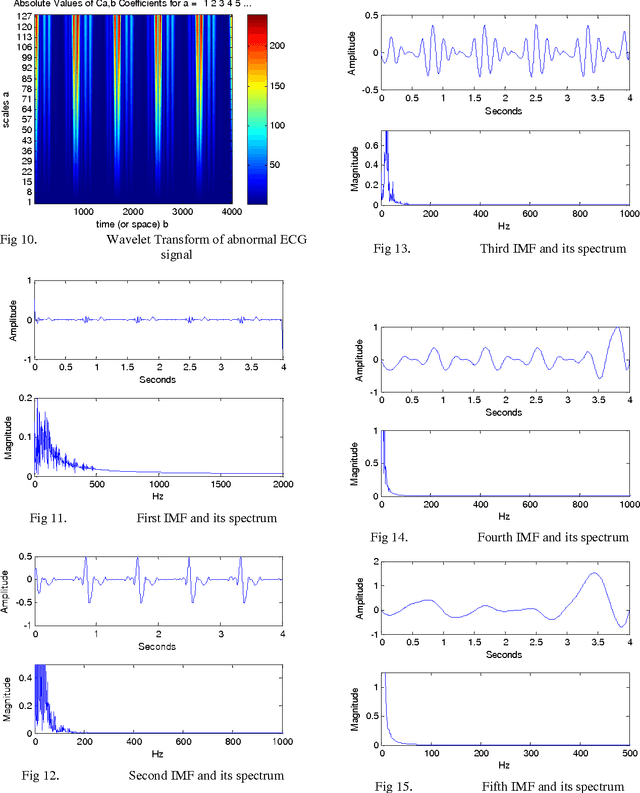
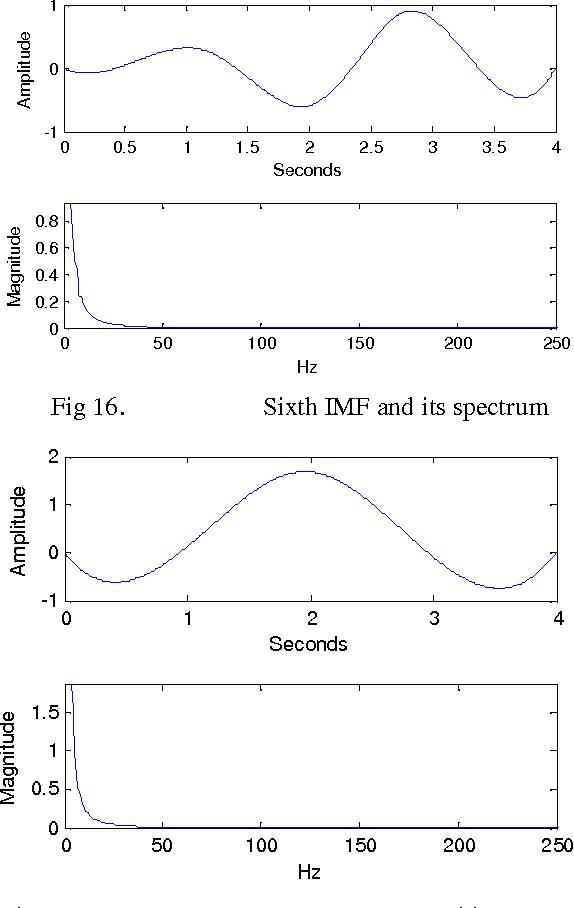
This paper describe the features extraction algorithm for electrocardiogram (ECG) signal using Huang Hilbert Transform and Wavelet Transform. ECG signal for an individual human being is different due to unique heart structure. The purpose of feature extraction of ECG signal would allow successful abnormality detection and efficient prognosis due to heart disorder. Some major important features will be extracted from ECG signals such as amplitude, duration, pre-gradient, post-gradient and so on. Therefore, we need a strong mathematical model to extract such useful parameter. Here an adaptive mathematical analysis model is Hilbert-Huang transform (HHT). This new approach, the Hilbert-Huang transform, is implemented to analyze the non-linear and nonstationary data. It is unique and different from the existing methods of data analysis and does not require an a priori functional basis. The effectiveness of the proposed scheme is verified through the simulation.
Fuzzy Logic of Speed and Steering Control System for Three Dimensional Line Following of an Autonomous Vehicle
Apr 10, 2010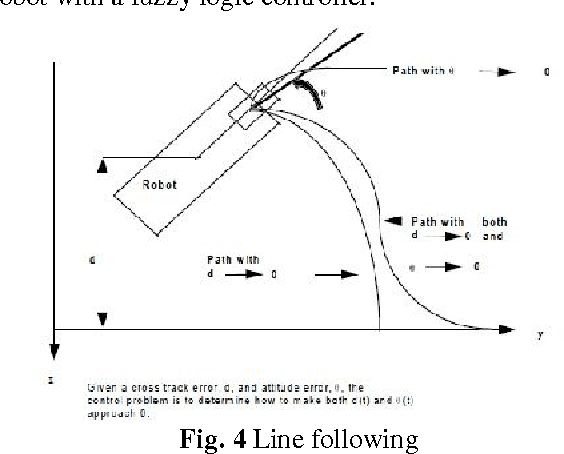
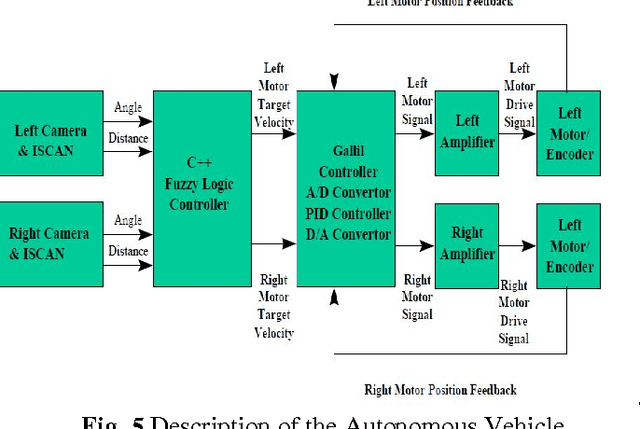


... This paper is to describe exploratory research on the design of a modular autonomous mobile robot controller. The controller incorporates a fuzzy logic [8] [9] approach for steering and speed control [37], a FL approach for ultrasound sensing and an overall expert system for guidance. The advantages of a modular system are related to portability and transportability, i.e. any vehicle can become autonomous with minimal modifications. A mobile robot test bed has been constructed in university of Cincinnati using a golf cart base. This cart has full speed control with guidance provided by a vision system and obstacle avoidance using ultrasonic sensors. The speed and steering fuzzy logic controller is supervised through a multi-axis motion controller. The obstacle avoidance system is based on a microcontroller interfaced with ultrasonic transducers. This micro-controller independently handles all timing and distance calculations and sends distance information back to the fuzzy logic controller via the serial line. This design yields a portable independent system in which high speed computer communication is not necessary. Vision guidance has been accomplished with the use of CCD cameras judging the current position of the robot.[34] [35][36] It will be generating a good image for reducing an uncertain wrong command from ground coordinate to tackle the parameter uncertainties of the system, and to obtain good WMR dynamic response.[1] Here we Apply 3D line following mythology. It transforms from 3D to 2D and also maps the image coordinates and vice versa, leading to the improved accuracy of the WMR position. ...