 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Approach for Unified Image Quality Assessment: Permutation Entropy-Based Features Fused with Random Forest for Natural-Scene and Screen-Content Images for Cross-Content Applications
Aug 24, 2025Image Quality Assessment (IQA) plays a vital role in applications such as image compression, restoration, and multimedia streaming. However, existing metrics often struggle to generalize across diverse image types - particularly between natural-scene images (NSIs) and screen-content images (SCIs) - due to their differing structural and perceptual characteristics. To address this limitation, we propose a novel full-reference IQA framework: Permutation Entropy-based Features Fused with Random Forest (PEFRF). PEFRF captures structural complexity by extracting permutation entropy from the gradient maps of reference, distorted, and fused images, forming a robust feature vector. These features are then input into a Random Forest regressor trained on subjective quality scores to predict final image quality. The framework is evaluated on 13 benchmark datasets comprising over 21,000 images and 40+ state-of-the-art IQA metrics. Experimental results demonstrate that PEFRF consistently outperforms existing methods across various distortion types and content domains, establishing its effectiveness as a unified and statistically significant solution for cross-content image quality assessment.
Design and Implementation of a DTMF Based Pick and Place Robotic Arm
Apr 10, 2020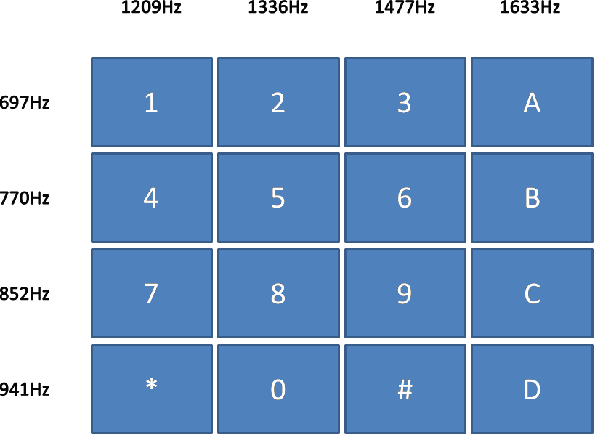
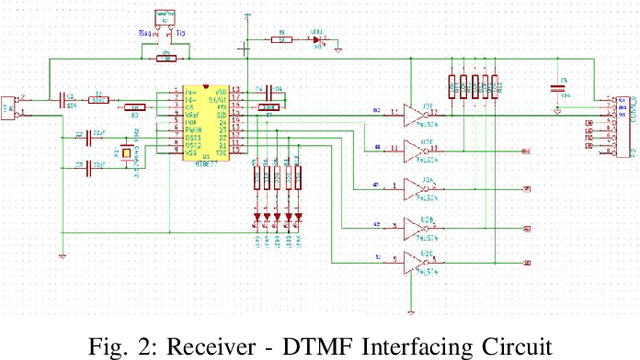
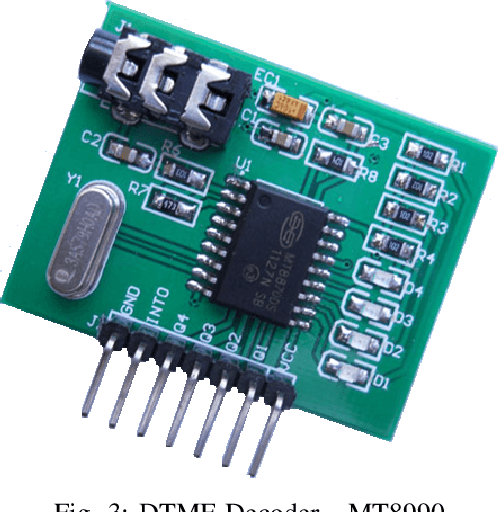
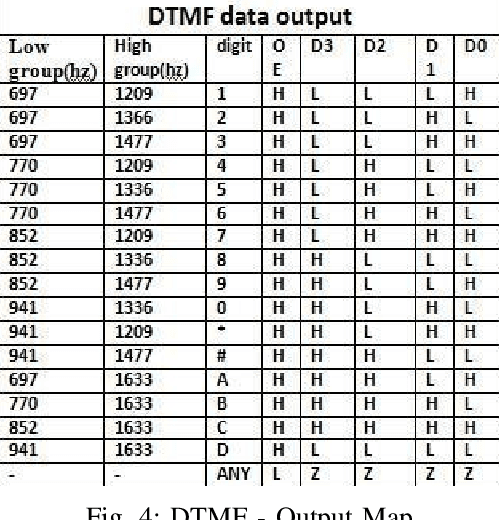
In recent times, developments in field of communication and robotics has progressed with leaps and bounds. In addition, the blend of both disciplines has contributed heavily in making human life easier and better. So in this work while making use of both the aforementioned technologies, a procedure for design and implementation of a mobile operated mechanical arm is proposed, that is, the proposed arm will be operated via a cellular device that connects with the receiver mounted on the robotic arm. Moreover, over the duration of a call, if any key is pressed from the cellular device than an indicator indistinct to the key pressed is noticed at the receiver side. This tone represents superimposition of two distinct frequencies and referred to as DTMF (dual tone multi-frequency). Further, the mechanical arm is handled via the DTMF tone. Also, the acquired tone at the receiver is taken into a micro-controller (ATMEGA16) using the DTMF decipher module i.e. MT8870. Further, the decipher module unwinds the DTMF signal into its corresponding two bit representation and then the matched number is transmitted to the micro-controller. The micro-controller is programmed to take an action based on the decoded value. Further, the micro-controller forwards control signals to the motor driver unit to move the arm in forward/backward or multi-directional course. Lastly, the mechanical arm is capable of picking and placing objects while being controlled wirelessly over GSM (Global System for Mobile Communications).
* Journal Article