 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecent Advancements in Deep Learning Applications and Methods for Autonomous Navigation -- A Comprehensive Review
Mar 14, 2023



This review paper presents a comprehensive overview of end-to-end deep learning frameworks used in the context of autonomous navigation, including obstacle detection, scene perception, path planning, and control. The paper aims to bridge the gap between autonomous navigation and deep learning by analyzing recent research studies and evaluating the implementation and testing of deep learning methods. It emphasizes the importance of navigation for mobile robots, autonomous vehicles, and unmanned aerial vehicles, while also acknowledging the challenges due to environmental complexity, uncertainty, obstacles, dynamic environments, and the need to plan paths for multiple agents. The review highlights the rapid growth of deep learning in engineering data science and its development of innovative navigation methods. It discusses recent interdisciplinary work related to this field and provides a brief perspective on the limitations, challenges, and potential areas of growth for deep learning methods in autonomous navigation. Finally, the paper summarizes the findings and practices at different stages, correlating existing and future methods, their applicability, scalability, and limitations. The review provides a valuable resource for researchers and practitioners working in the field of autonomous navigation and deep learning.
End-to-End Deep Learning Framework for Real-Time Inertial Attitude Estimation using 6DoF IMU
Feb 13, 2023



Inertial Measurement Units (IMU) are commonly used in inertial attitude estimation from engineering to medical sciences. There may be disturbances and high dynamics in the environment of these applications. Also, their motion characteristics and patterns also may differ. Many conventional filters have been proposed to tackle the inertial attitude estimation problem based on IMU measurements. There is no generalization over motion and environmental characteristics in these filters. As a result, the presented conventional filters will face various motion characteristics and patterns, which will limit filter performance and need to optimize the filter parameters for each situation. In this paper, two end-to-end deep-learning models are proposed to solve the problem of real-time attitude estimation by using inertial sensor measurements, which are generalized to motion patterns, sampling rates, and environmental disturbances. The proposed models incorporate accelerometer and gyroscope readings as inputs, which are collected from a combination of seven public datasets. The models consist of convolutional neural network (CNN) layers combined with Bi-Directional Long-Short Term Memory (LSTM) followed by a Fully Forward Neural Network (FFNN) to estimate the quaternion. To evaluate the validity and reliability, we have performed an extensive and comprehensive evaluation over seven publicly available datasets, which consist of more than 120 hours and 200 kilometers of IMU measurements. The results show that the proposed method outperforms the state-of-the-art methods in terms of accuracy and robustness. Furthermore, it demonstrates that this model generalizes better than other methods over various motion characteristics and sensor sampling rates.
Investigating Flight Envelope Variation Predictability of Impaired Aircraft using Least-Squares Regression Analysis
May 20, 2019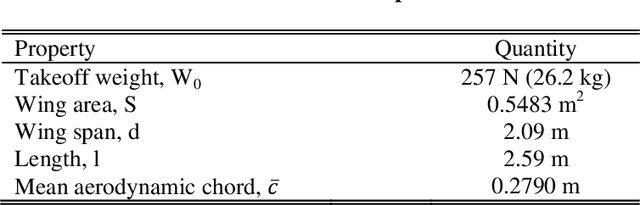
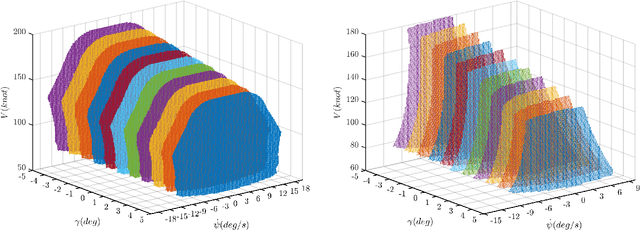
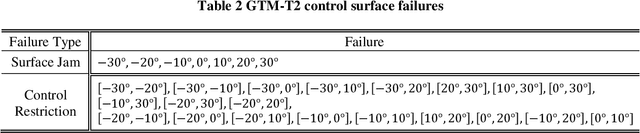
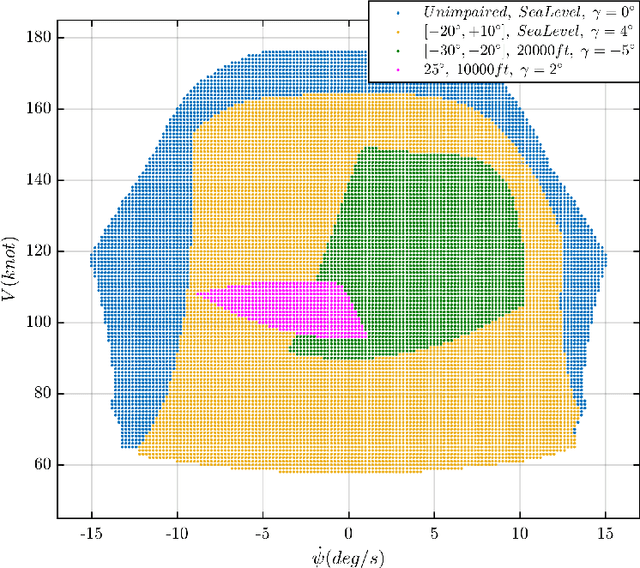
Aircraft failures alter the aircraft dynamics and cause maneuvering flight envelope to change. Such envelope variations are nonlinear and generally unpredictable by the pilot as they are governed by the aircraft complex dynamics. Hence, in order to prevent in-flight Loss of Control it is crucial to practically predict the impaired aircraft's flight envelope variation due to any a-priori unknown failure degree. This paper investigates the predictability of the number of trim points within the maneuvering flight envelope and its centroid using both linear and nonlinear least-squares estimation methods. To do so, various polynomial models and nonlinear models based on hyperbolic tangent function are developed and compared which incorporate the influencing factors on the envelope variations as the inputs and estimate the centroid and the number of trim points of the maneuvering flight envelope at any intended failure degree. Results indicate that both the polynomial and hyperbolic tangent function-based models are capable of predicting the impaired fight envelope variation with good precision. Furthermore, it is shown that the regression equation of the best polynomial fit enables direct assessment of the impaired aircraft's flight envelope contraction and displacement sensitivity to the specific parameters characterizing aircraft failure and flight condition.