 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic-based Unsupervised Framing Analysis (SUFA): A Novel Approach for Computational Framing Analysis
May 21, 2025This research presents a novel approach to computational framing analysis, called Semantic Relations-based Unsupervised Framing Analysis (SUFA). SUFA leverages semantic relations and dependency parsing algorithms to identify and assess entity-centric emphasis frames in news media reports. This innovative method is derived from two studies -- qualitative and computational -- using a dataset related to gun violence, demonstrating its potential for analyzing entity-centric emphasis frames. This article discusses SUFA's strengths, limitations, and application procedures. Overall, the SUFA approach offers a significant methodological advancement in computational framing analysis, with its broad applicability across both the social sciences and computational domains.
Exploring the Potential of the Large Language Models in Identifying Misleading News Headlines
May 06, 2024

In the digital age, the prevalence of misleading news headlines poses a significant challenge to information integrity, necessitating robust detection mechanisms. This study explores the efficacy of Large Language Models (LLMs) in identifying misleading versus non-misleading news headlines. Utilizing a dataset of 60 articles, sourced from both reputable and questionable outlets across health, science & tech, and business domains, we employ three LLMs- ChatGPT-3.5, ChatGPT-4, and Gemini-for classification. Our analysis reveals significant variance in model performance, with ChatGPT-4 demonstrating superior accuracy, especially in cases with unanimous annotator agreement on misleading headlines. The study emphasizes the importance of human-centered evaluation in developing LLMs that can navigate the complexities of misinformation detection, aligning technical proficiency with nuanced human judgment. Our findings contribute to the discourse on AI ethics, emphasizing the need for models that are not only technically advanced but also ethically aligned and sensitive to the subtleties of human interpretation.
Multi-Dialect Arabic BERT for Country-Level Dialect Identification
Jul 10, 2020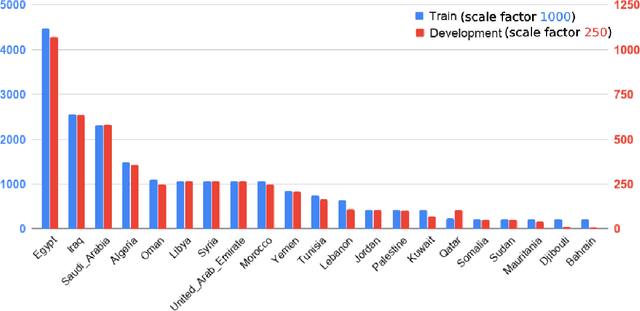
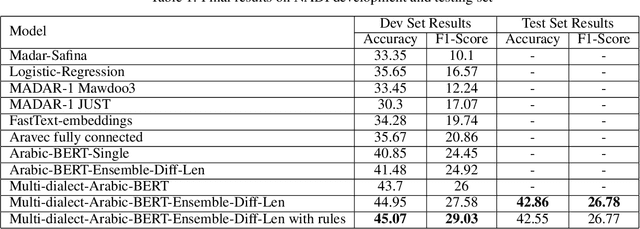
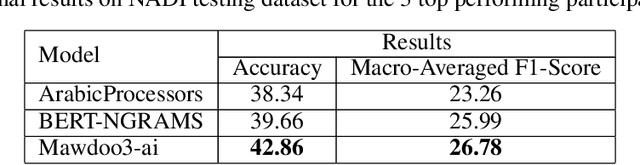
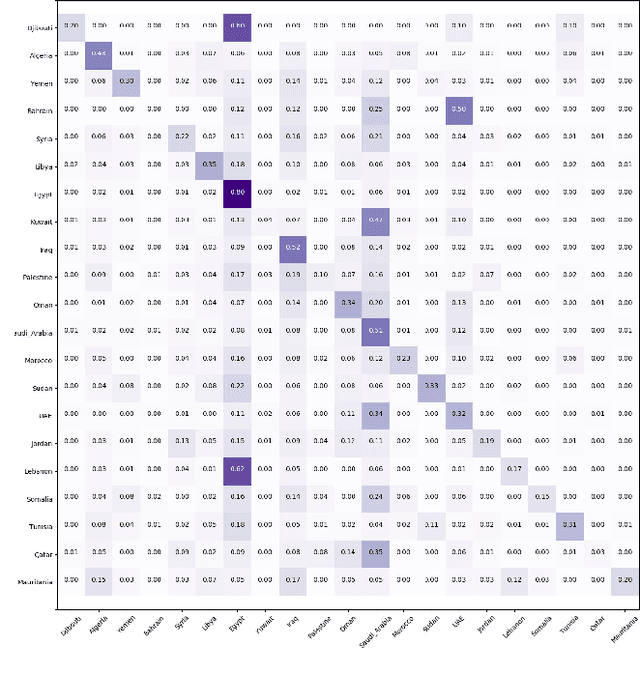
Arabic dialect identification is a complex problem for a number of inherent properties of the language itself. In this paper, we present the experiments conducted, and the models developed by our competing team, Mawdoo3 AI, along the way to achieving our winning solution to subtask 1 of the Nuanced Arabic Dialect Identification (NADI) shared task. The dialect identification subtask provides 21,000 country-level labeled tweets covering all 21 Arab countries. An unlabeled corpus of 10M tweets from the same domain is also presented by the competition organizers for optional use. Our winning solution itself came in the form of an ensemble of different training iterations of our pre-trained BERT model, which achieved a micro-averaged F1-score of 26.78% on the subtask at hand. We publicly release the pre-trained language model component of our winning solution under the name of Multi-dialect-Arabic-BERT model, for any interested researcher out there.
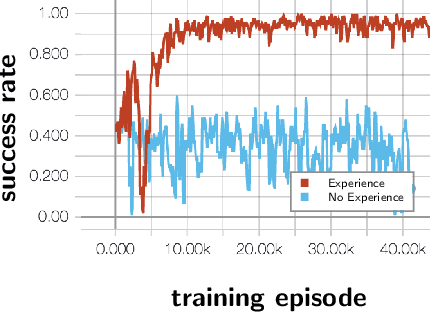
Learning When to Drive in Intersections by Combining Reinforcement Learning and Model Predictive Control
Aug 01, 2019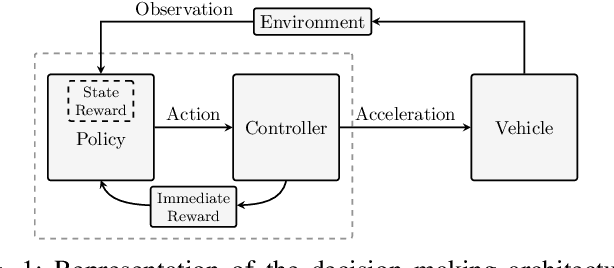
In this paper, we propose a decision making algorithm intended for automated vehicles that negotiate with other possibly non-automated vehicles in intersections. The decision algorithm is separated into two parts: a high-level decision module based on reinforcement learning, and a low-level planning module based on model predictive control. Traffic is simulated with numerous predefined driver behaviors and intentions, and the performance of the proposed decision algorithm was evaluated against another controller. The results show that the proposed decision algorithm yields shorter training episodes and an increased performance in success rate compared to the other controller.
Learning Negotiating Behavior Between Cars in Intersections using Deep Q-Learning
Oct 24, 2018
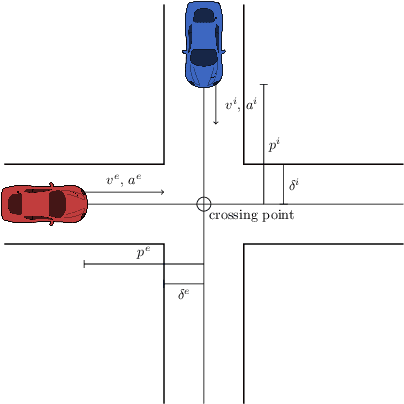
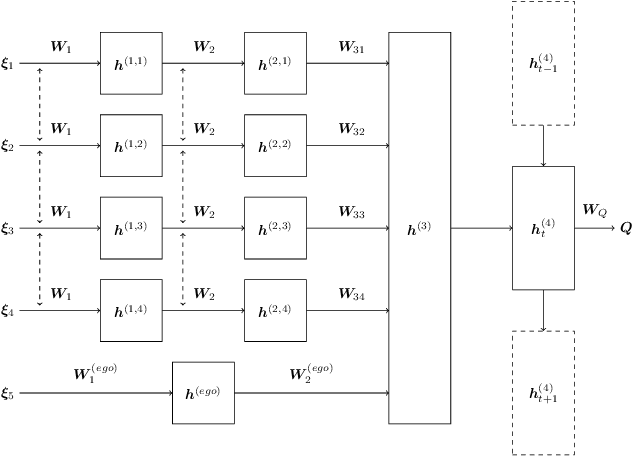
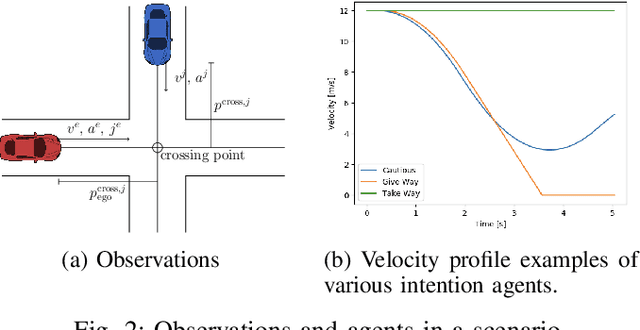
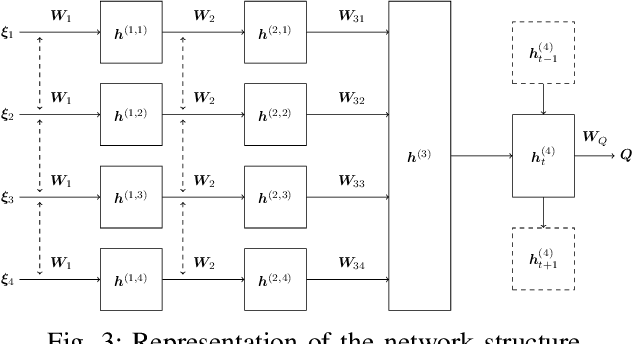
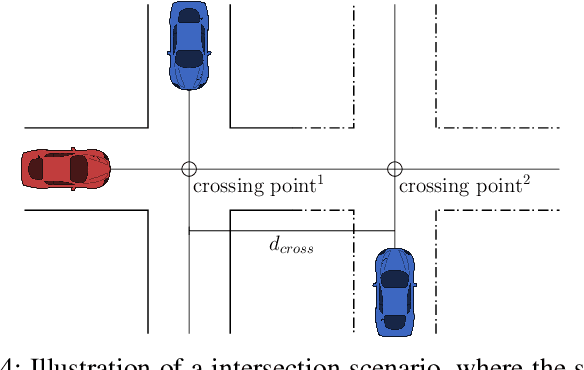
This paper concerns automated vehicles negotiating with other vehicles, typically human driven, in crossings with the goal to find a decision algorithm by learning typical behaviors of other vehicles. The vehicle observes distance and speed of vehicles on the intersecting road and use a policy that adapts its speed along its pre-defined trajectory to pass the crossing efficiently. Deep Q-learning is used on simulated traffic with different predefined driver behaviors and intentions. The results show a policy that is able to cross the intersection avoiding collision with other vehicles 98% of the time, while at the same time not being too passive. Moreover, inferring information over time is important to distinguish between different intentions and is shown by comparing the collision rate between a Deep Recurrent Q-Network at 0.85% and a Deep Q-learning at 1.75%.