 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dual Quaternion based RRT* Path Planning Approach for Satellite Rendezvous and Docking
Dec 19, 2025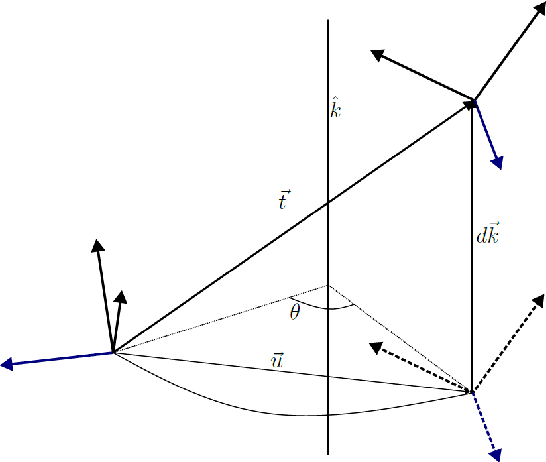
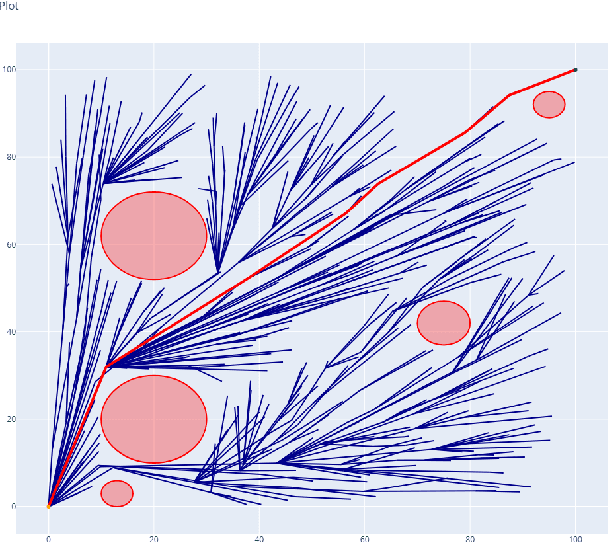
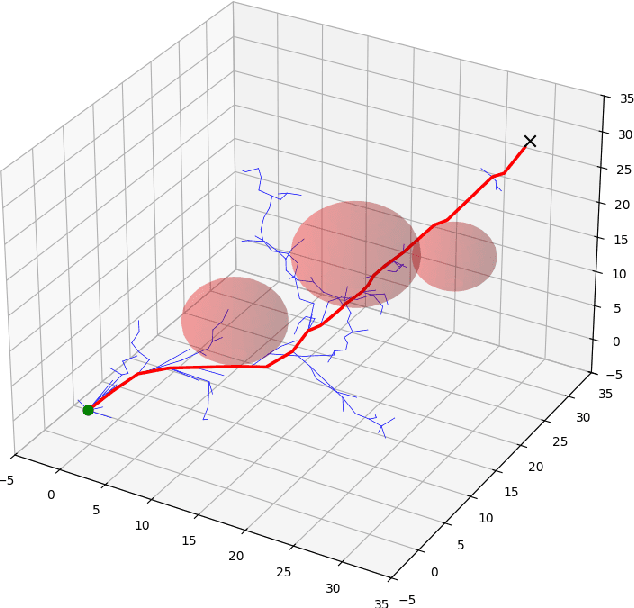
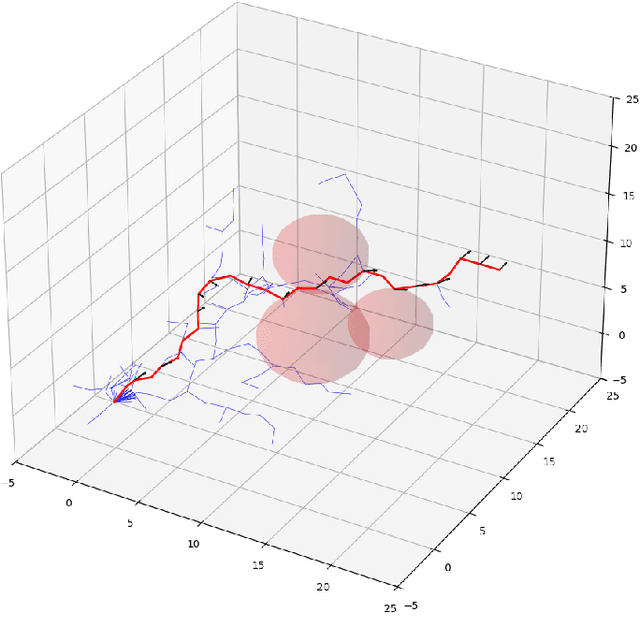
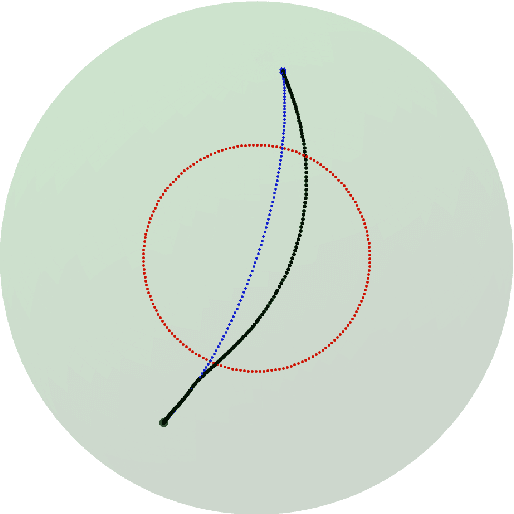
This paper proposes a sampling-based motion planner that employs a dual quaternion representation to generate smooth, collision-free six-degree-of-freedom pose trajectories for satellite rendezvous and docking under keep-out zone constraints. The proposed planner integrates the dual quaternion algebra directly into an RRT* framework, thereby enabling natural screw motion interpolation in SE(3). The dual quaternion-based RRT* has been implemented in Python and demonstrated on a representative multi-obstacle scenario. A comparison with a standard RRT* using separate translation and quaternion steering highlights the enhanced pose continuity and obstacle avoidance of the proposed method. The present approach is purely kinematic in nature and does not take into account relative orbital dynamics. Consequently, the resulting path provides a preliminary estimate for a subsequent optimisation-based trajectory planner, which will refine the motion with dynamic constraints for the purpose of practical satellite rendezvous and docking missions.
Deep reinforcement learning-based spacecraft attitude control with pointing keep-out constraint
Nov 13, 2025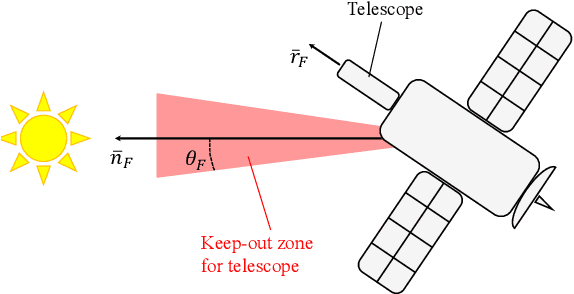

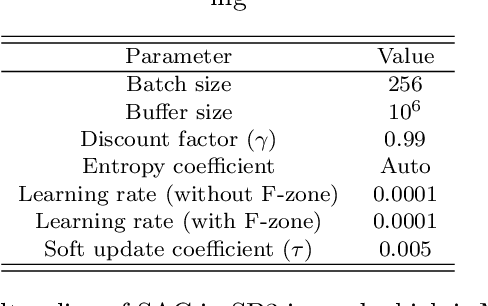
This paper implements deep reinforcement learning (DRL) for spacecraft reorientation control with a single pointing keep-out zone. The Soft Actor-Critic (SAC) algorithm is adopted to handle continuous state and action space. A new state representation is designed to explicitly include a compact representation of the attitude constraint zone. The reward function is formulated to achieve the control objective while enforcing the attitude constraint. A curriculum learning approach is used for the agent training. Simulation results demonstrate the effectiveness of the proposed DRL-based method for spacecraft pointing-constrained attitude control.
Forecasting Thermospheric Density with Transformers for Multi-Satellite Orbit Management
Nov 08, 2025Accurate thermospheric density prediction is crucial for reliable satellite operations in Low Earth Orbits, especially at high solar and geomagnetic activity. Physics-based models such as TIE-GCM offer high fidelity but are computationally expensive, while empirical models like NRLMSIS are efficient yet lack predictive power. This work presents a transformer-based model that forecasts densities up to three days ahead and is intended as a drop-in replacement for an empirical baseline. Unlike recent approaches, it avoids spatial reduction and complex input pipelines, operating directly on a compact input set. Validated on real-world data, the model improves key prediction metrics and shows potential to support mission planning.