 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Time Series Summarization and Prediction Algorithm and its Application to COVID-19 Data Mining
May 01, 2020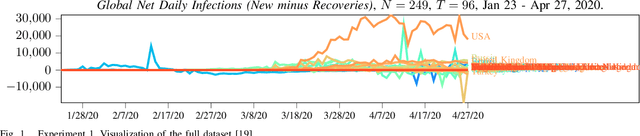
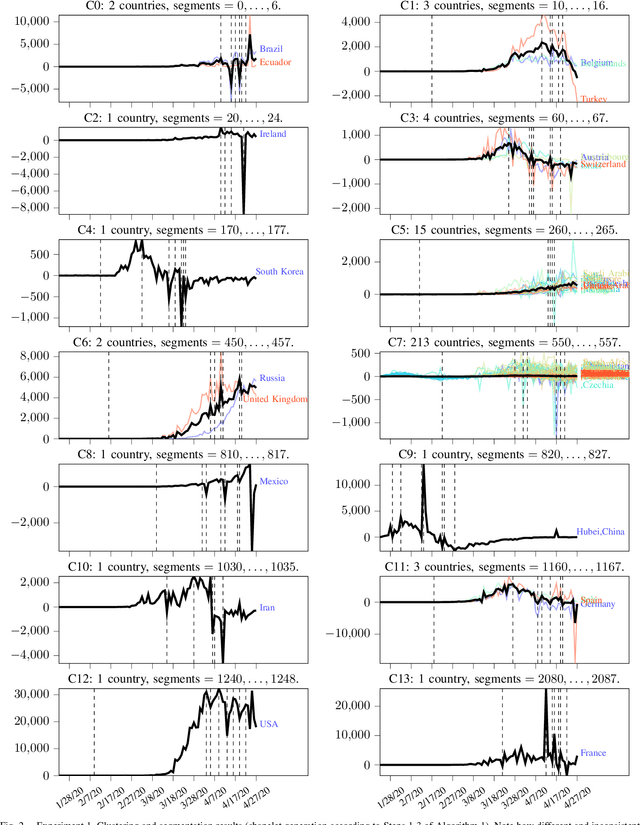
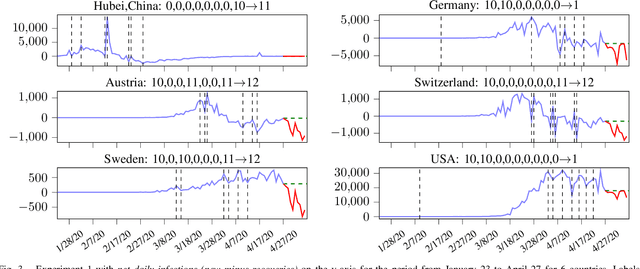
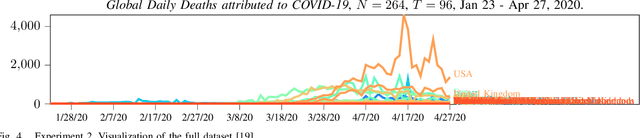
This paper proposes a simple method to extract from a set of multiple related time series a compressed representation for each time series based on statistics for the entire set of all time series. This is achieved by a hierarchical algorithm that first generates an alphabet of shapelets based on the segmentation of centroids for clustered data, before labels of these shapelets are assigned to the segmentation of each single time series via nearest neighbor search using unconstrained dynamic time warping as distance measure to deal with non-uniform time series lenghts. Thereby, a sequence of labels is assigned for each time series. Completion of the last label sequence permits prediction of individual time series. Proposed method is evaluated on two global COVID-19 datasets, first, for the number of daily net cases (daily new infections minus daily recoveries), and, second, for the number of daily deaths attributed to COVID-19 as of April 27, 2020. The first dataset involves 249 time series for different countries, each of length 96. The second dataset involves 264 time series, each of length 96. Based on detected anomalies in available data a decentralized exit strategy from lockdowns is advocated.
A posteriori Trading-inspired Model-free Time Series Segmentation
Dec 16, 2019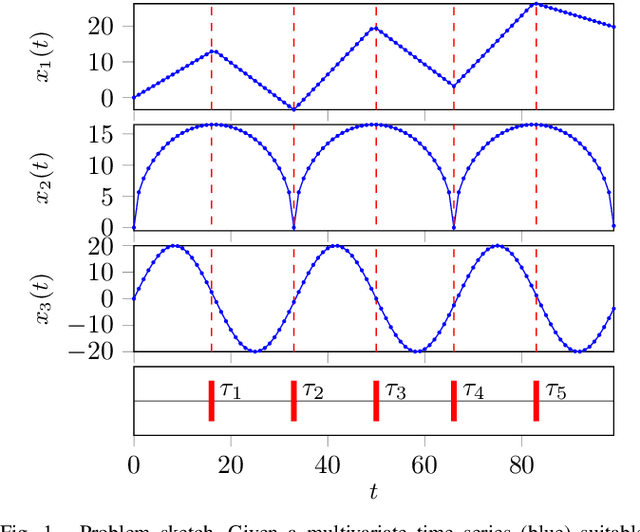
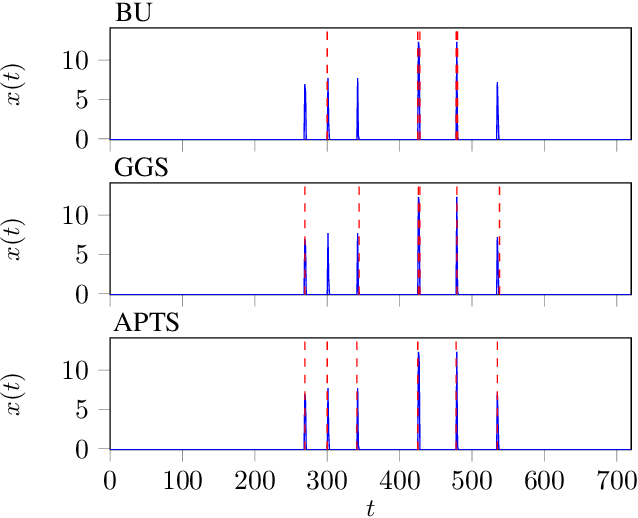
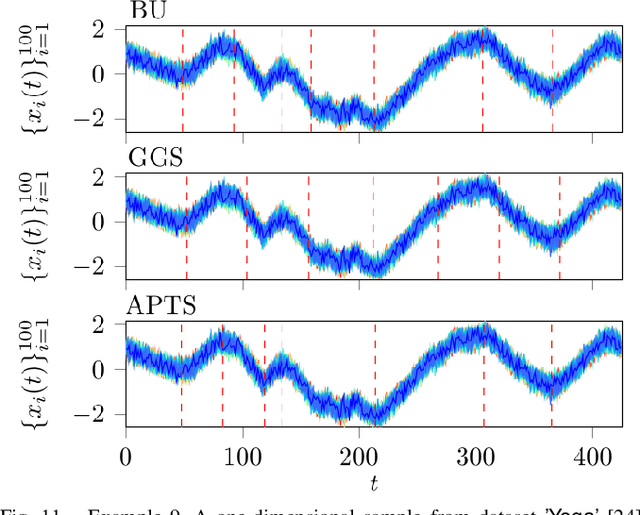
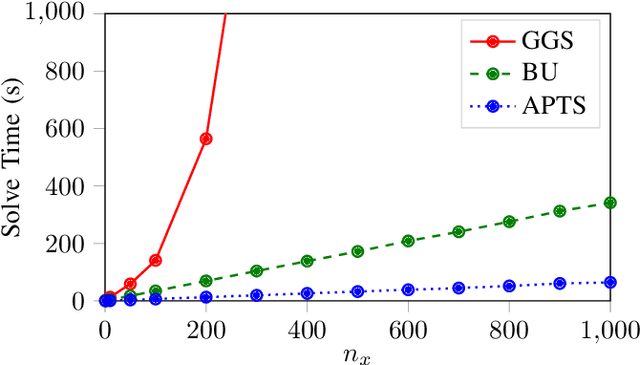
Within the context of multivariate time series segmentation this paper proposes a method inspired by a posteriori optimal trading. After a normalization step time series are treated channel-wise as surrogate stock prices that can be traded optimally a posteriori in a virtual portfolio holding either stock or cash. Linear transaction costs are interpreted as hyperparameters for noise filtering. Resulting trading signals as well as resulting trading signals obtained on the reversed time series are used for unsupervised labeling, before a consensus over channels is reached that determines segmentation time instants. The method is model-free such that no model prescriptions for segments are made. Benefits of proposed approach include simplicity, computational efficiency and adaptability to a wide range of different shapes of time series. Performance is demonstrated on synthetic and real-world data, including a large-scale dataset comprising a multivariate time series of dimension 1000 and length 2709. Proposed method is compared to a popular model-based bottom-up approach fitting piecewise affine models and to a recent model-based top-down approach fitting Gaussian models, and found to be consistently faster while producing more intuitive results.
Online Sampling in the Parameter Space of a Neural Network for GPU-accelerated Motion Planning of Autonomous Vehicles
Apr 14, 2019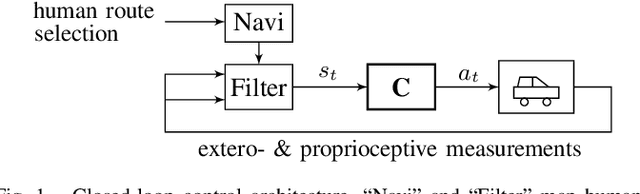
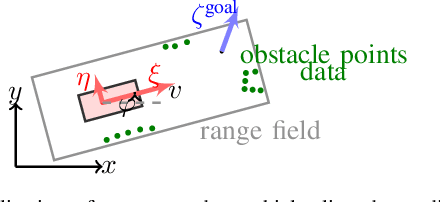
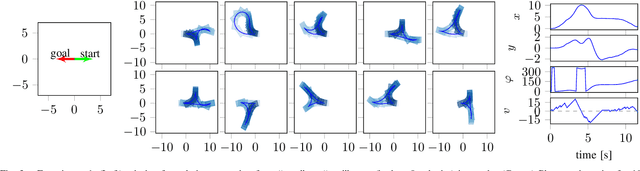
This paper proposes online sampling in the parameter space of a neural network for GPU-accelerated motion planning of autonomous vehicles. Neural networks are used as controller parametrization since they can handle nonlinear non-convex systems and their complexity does not scale with prediction horizon length. Network parametrizations are sampled at each sampling time and then held constant throughout the prediction horizon. Controls still vary over the prediction horizon due to varying feature vectors fed to the network. Full-dimensional vehicles are modeled by polytopes. Under the assumption of obstacle point data, and their extrapolation over a prediction horizon under constant velocity assumption, collision avoidance reduces to linear inequality checks. Steering and longitudinal acceleration controls are determined simultaneously. The proposed method is designed for parallelization and therefore well-suited to benefit from continuing advancements in hardware such as GPUs. Characteristics of proposed method are illustrated in 5 numerical simulation experiments including dynamic obstacle avoidance, waypoint tracking requiring alternating forward and reverse driving with maximal steering, and a reverse parking scenario.
Encoding Motion Primitives for Autonomous Vehicles using Virtual Velocity Constraints and Neural Network Scheduling
Oct 03, 2018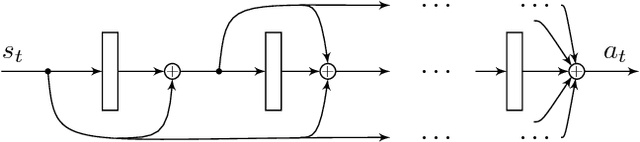

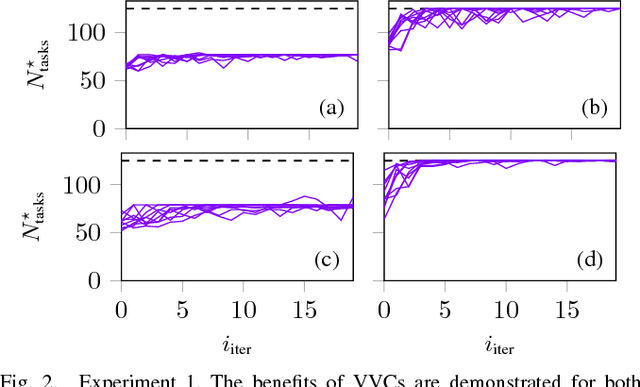
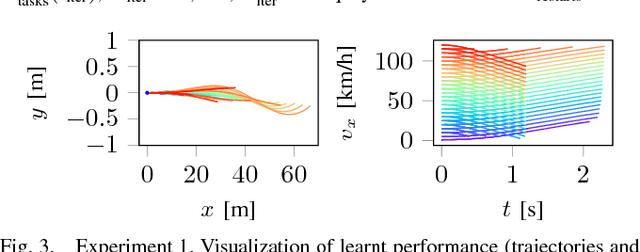
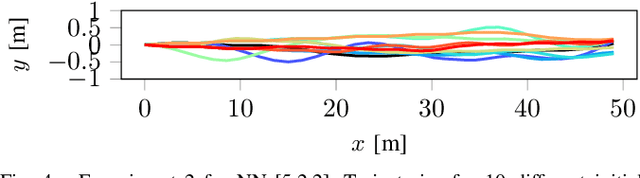
Within the context of trajectory planning for autonomous vehicles this paper proposes methods for efficient encoding of motion primitives in neural networks on top of model-based and gradient-free reinforcement learning. It is distinguished between 5 core aspects: system model, network architecture, training algorithm, training tasks selection and hardware/software implementation. For the system model, a kinematic (3-states-2-controls) and a dynamic (16-states-2-controls) vehicle model are compared. For the network architecture, 3 feedforward structures are compared including weighted skip connections. For the training algorithm, virtual velocity constraints and network scheduling are proposed. For the training tasks, different feature vector selections are discussed. For the implementation, aspects of gradient-free learning using 1 GPU and the handling of perturbation noise therefore are discussed. The effects of proposed methods are illustrated in experiments encoding up to 14625 motion primitives. The capabilities of tiny neural networks with as few as 10 scalar parameters when scheduled on vehicle velocity are emphasized.
Automating Vehicles by Deep Reinforcement Learning using Task Separation with Hill Climbing
Aug 02, 2018
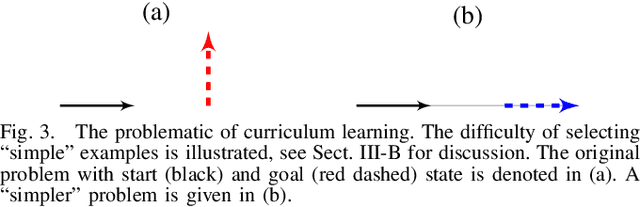

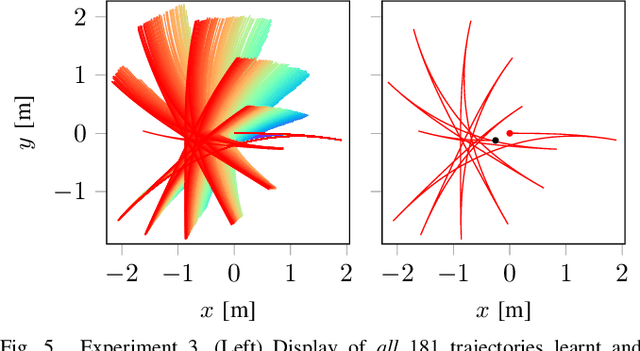
Within the context of autonomous driving a model-based reinforcement learning algorithm is proposed for the design of neural network-parameterized controllers. Classical model-based control methods, which include sampling- and lattice-based algorithms and model predictive control, suffer from the trade-off between model complexity and computational burden required for the online solution of expensive optimization or search problems at every short sampling time. To circumvent this trade-off, a 2-step procedure is motivated: first learning of a controller during offline training based on an arbitrarily complicated mathematical system model, before online fast feedforward evaluation of the trained controller. The contribution of this paper is the proposition of a simple gradient-free and model-based algorithm for deep reinforcement learning using task separation with hill climbing (TSHC). In particular, (i) simultaneous training on separate deterministic tasks with the purpose of encoding many motion primitives in a neural network, and (ii) the employment of maximally sparse rewards in combination with virtual velocity constraints (VVCs) in setpoint proximity are advocated.