 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Quantized LLMs into Robotics Systems as Edge AI to Leverage their Natural Language Processing Capabilities
Jun 11, 2025Large Language Models (LLMs) have experienced great advancements in the last year resulting in an increase of these models in several fields to face natural language tasks. The integration of these models in robotics can also help to improve several aspects such as human-robot interaction, navigation, planning and decision-making. Therefore, this paper introduces llama\_ros, a tool designed to integrate quantized Large Language Models (LLMs) into robotic systems using ROS 2. Leveraging llama.cpp, a highly optimized runtime engine, llama\_ros enables the efficient execution of quantized LLMs as edge artificial intelligence (AI) in robotics systems with resource-constrained environments, addressing the challenges of computational efficiency and memory limitations. By deploying quantized LLMs, llama\_ros empowers robots to leverage the natural language understanding and generation for enhanced decision-making and interaction which can be paired with prompt engineering, knowledge graphs, ontologies or other tools to improve the capabilities of autonomous robots. Additionally, this paper provides insights into some use cases of using llama\_ros for planning and explainability in robotics.
VAULT: A Mobile Mapping System for ROS 2-based Autonomous Robots
Jun 11, 2025



Localization plays a crucial role in the navigation capabilities of autonomous robots, and while indoor environments can rely on wheel odometry and 2D LiDAR-based mapping, outdoor settings such as agriculture and forestry, present unique challenges that necessitate real-time localization and consistent mapping. Addressing this need, this paper introduces the VAULT prototype, a ROS 2-based mobile mapping system (MMS) that combines various sensors to enable robust outdoor and indoor localization. The proposed solution harnesses the power of Global Navigation Satellite System (GNSS) data, visual-inertial odometry (VIO), inertial measurement unit (IMU) data, and the Extended Kalman Filter (EKF) to generate reliable 3D odometry. To further enhance the localization accuracy, Visual SLAM (VSLAM) is employed, resulting in the creation of a comprehensive 3D point cloud map. By leveraging these sensor technologies and advanced algorithms, the prototype offers a comprehensive solution for outdoor localization in autonomous mobile robots, enabling them to navigate and map their surroundings with confidence and precision.
Integration of Large Language Models within Cognitive Architectures for Autonomous Robots
Sep 26, 2023



The usage of Large Language Models (LLMs) has increased recently, not only due to the significant improvements in their accuracy but also because of the use of the quantization that allows running these models without intense hardware requirements. As a result, the LLMs have proliferated. It implies the creation of a great variety of LLMs with different capabilities. This way, this paper proposes the integration of LLMs in cognitive architectures for autonomous robots. Specifically, we present the design, development and deployment of the llama\_ros tool that allows the easy use and integration of LLMs in ROS 2-based environments, afterward integrated with the state-of-the-art cognitive architecture MERLIN2 for updating a PDDL-based planner system. This proposal is evaluated quantitatively and qualitatively, measuring the impact of incorporating the LLMs in the cognitive architecture.
SAILOR: Perceptual Anchoring For Robotic Cognitive Architectures
Mar 14, 2023Symbolic anchoring is a crucial problem in the field of robotics, as it enables robots to obtain symbolic knowledge from the perceptual information acquired through their sensors. In cognitive-based robots, this process of processing sub-symbolic data from real-world sensors to obtain symbolic knowledge is still an open problem. To address this issue, this paper presents SAILOR, a framework for providing symbolic anchoring in ROS 2 ecosystem. SAILOR aims to maintain the link between symbolic data and perceptual data in real robots over time. It provides a semantic world modeling approach using two deep learning-based sub-symbolic robotic skills: object recognition and matching function. The object recognition skill allows the robot to recognize and identify objects in its environment, while the matching function enables the robot to decide if new perceptual data corresponds to existing symbolic data. This paper provides a description of the framework, the pipeline and development as well as its integration in MERLIN2, a hybrid cognitive architecture fully functional in robots running ROS 2.
KANT: A tool for Grounding and Knowledge Management
Apr 18, 2022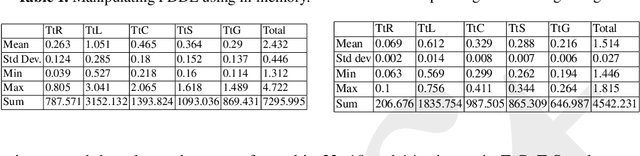
The intelligent robotics community usually organizes knowledge into symbolic and sub-symbolic levels. These two levels establish the set of symbols and rules for manipulating knowledge based on their (symbol system - dictionary). Thus, the correspondences -- Grounding or knowledge representation -- require specific software techniques for anchoring continuous and discrete state variables between these two levels. This paper presents the design and evaluation of an Open Source tool called KANT(Knowledge mAnagemeNT) to let different components of the system architecture controlling the robot query, save, edit, and delete the data from the Knowledge Base without having to worry about the type and the implementation of the source data. Using KANT, components managing subsymbolic information can smoothly interact with symbolic components. Besides, implementation mechanisms used in KANT, such as the use of in-memory and non-SQL databases, improve the performance of the knowledge management systems in ROS middleware, as shown by the evaluations presented in this work.