 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicular Multi-object Tracking with Persistent Detector Failures
Jul 25, 2019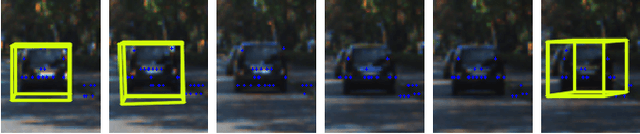


Autonomous vehicles often perceive the environment by feeding sensor data to a learned detector algorithm, then feeding detections to a multi-object tracker that models object motions over time. Probabilistic models of multi-object trackers typically assume that errors in the detector algorithm occur randomly over time. We instead assume that undetected objects and false detections will persist in certain conditions, and modify the tracking framework to account for them. The modifications are tested with a novel lidar-based vehicle detector, and shown to enable real-time detection and tracking without specialized computing hardware.
Measurement-wise Occlusion in Multi-object Tracking
May 21, 2018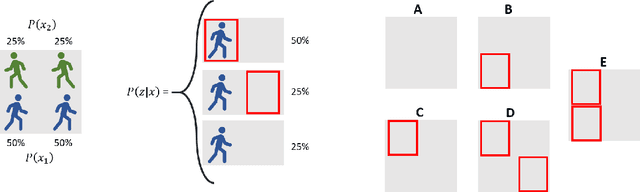
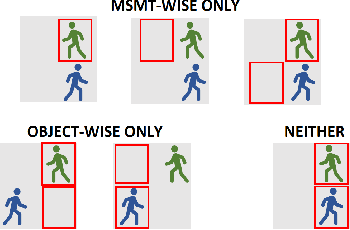
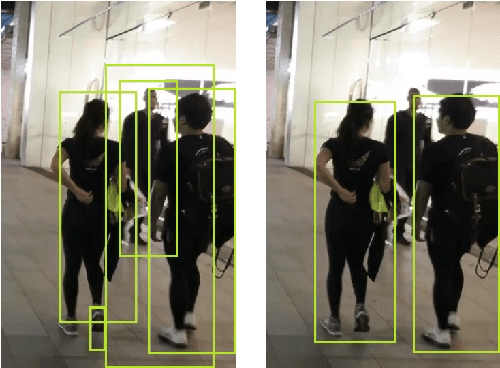

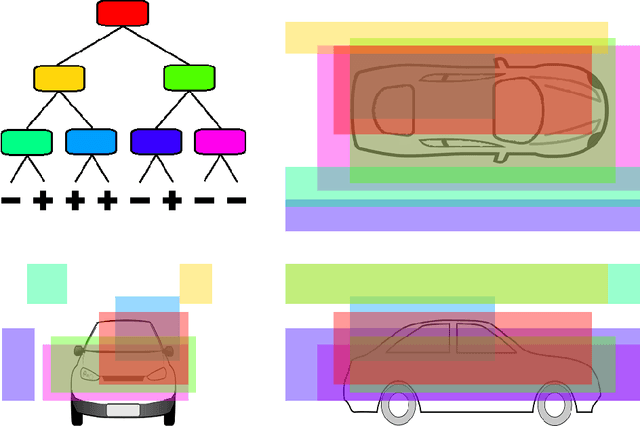
Handling object interaction is a fundamental challenge in practical multi-object tracking, even for simple interactive effects such as one object temporarily occluding another. We formalize the problem of occlusion in tracking with two different abstractions. In object-wise occlusion, objects that are occluded by other objects do not generate measurements. In measurement-wise occlusion, a previously unstudied approach, all objects may generate measurements but some measurements may be occluded by others. While the relative validity of each abstraction depends on the situation and sensor, measurement-wise occlusion fits into probabilistic multi-object tracking algorithms with much looser assumptions on object interaction. Its value is demonstrated by showing that it naturally derives a popular approximation for lidar tracking, and by an example of visual tracking in image space.
Optimal Alarms for Vehicular Collision Detection
Aug 16, 2017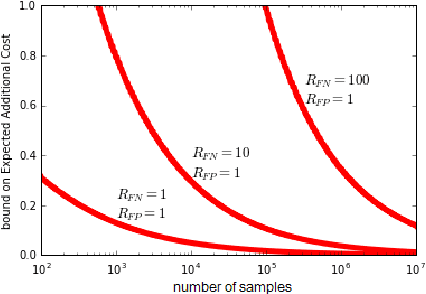
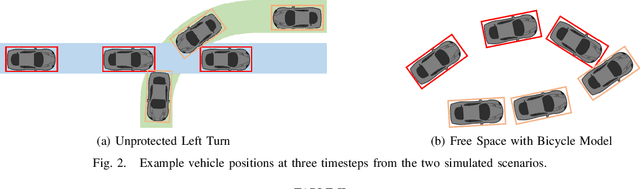
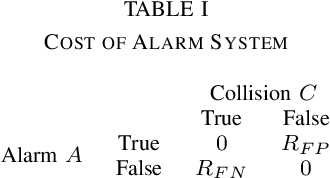

An important application of intelligent vehicles is advance detection of dangerous events such as collisions. This problem is framed as a problem of optimal alarm choice given predictive models for vehicle location and motion. Techniques for real-time collision detection are surveyed and grouped into three classes: random Monte Carlo sampling, faster deterministic approximations, and machine learning models trained by simulation. Theoretical guarantees on the performance of these collision detection techniques are provided where possible, and empirical analysis is provided for two example scenarios. Results validate Monte Carlo sampling as a robust solution despite its simplicity.