 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvolutional Neural Networks Towards Arduino Navigation of Indoor Environments
Nov 27, 2020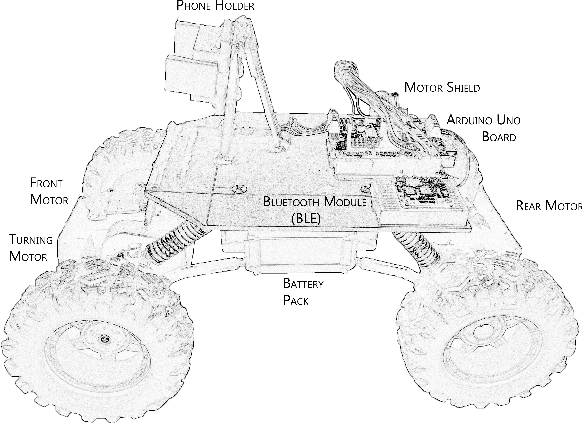
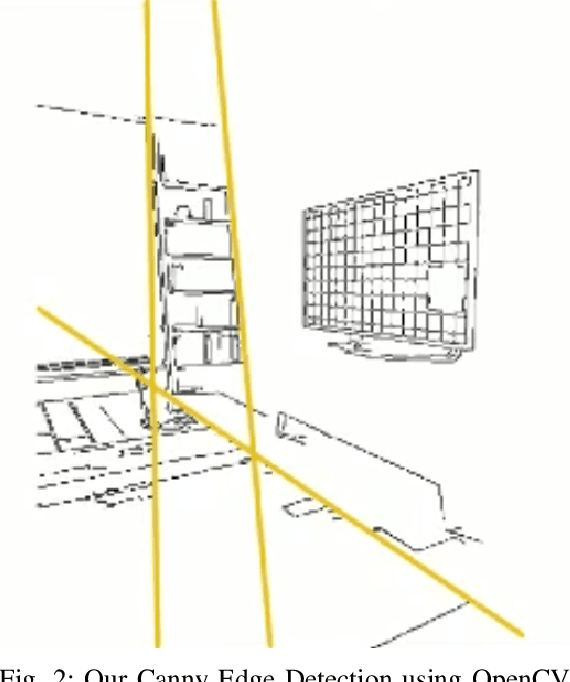

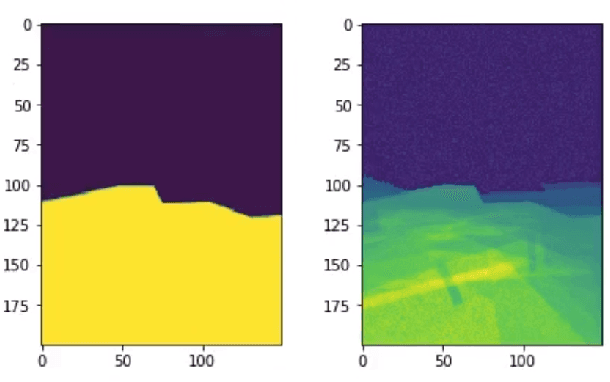
In this paper we propose a number of tested ways in which a low-budget demo car could be made to navigate an indoor environment. Canny Edge Detection, Supervised Floor Detection and Imitation Learning were used separately and are contrasted in their effectiveness. The equipment used in this paper approximated an autonomous robot configured to work with a mobile device for image processing. This paper does not provide definitive solutions and simply illustrates the approaches taken to successfully achieve autonomous navigation of indoor environments. The successes and failures of all approaches were recorded and elaborated on to give the reader an insight into the construction of such an autonomous robot.
Experiments in Autonomous Driving Through Imitation Learning
Nov 25, 2020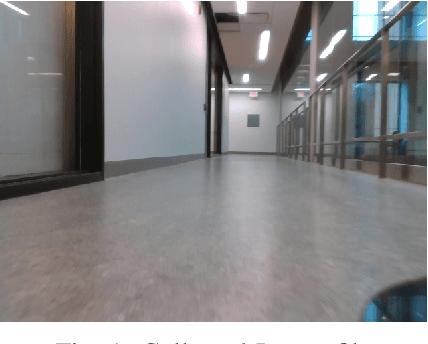
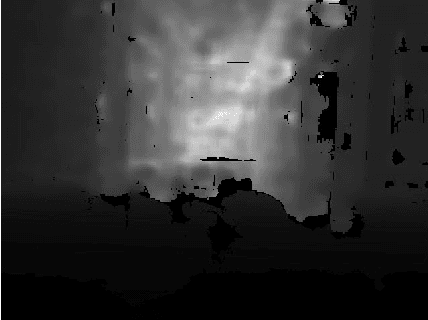
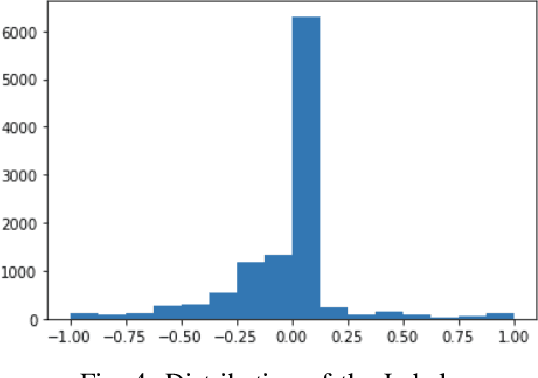
This report demonstrates several methods used to make a self-driving vehicle using a supervised learning algorithm and a forward-facing RGBD camera. The project originally involved research in creating an adversarial attack on the vehicle's model, but due to difficulties with the initial training of the car, the plans were discarded in favor of completing the imitation learning portion of the project. Many approaches were explored, but due to challenges introduced by an unbalanced data set, the approaches had limited effectiveness.