 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStigmergy-based collision-avoidance algorithm for self-organising swarms
Sep 22, 2021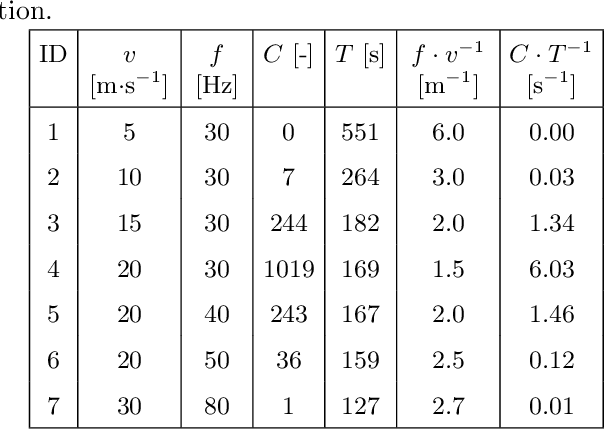
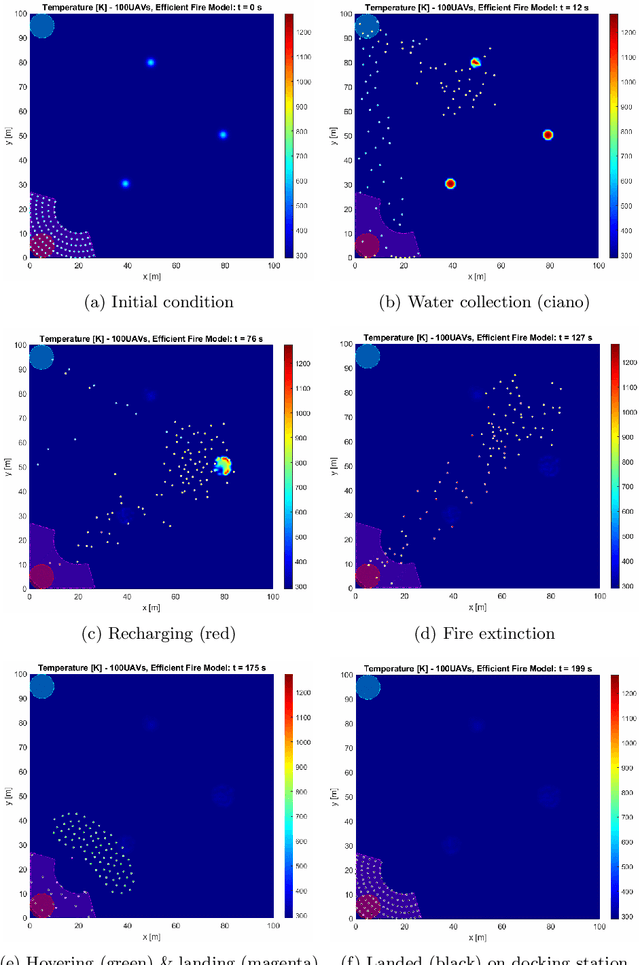
Real-time multi-agent collision-avoidance algorithms comprise a key enabling technology for the practical use of self-organising swarms of drones. This paper proposes a decentralised reciprocal collision-avoidance algorithm, which is based on stigmergy and scalable. The algorithm is computationally inexpensive, based on the gradient of the locally measured dynamic cumulative signal strength field which results from the signals emitted by the swarm. The signal strength acts as a repulsor on each drone, which then tends to steer away from the noisiest regions (cluttered environment), thus avoiding collisions. The magnitudes of these repulsive forces can be tuned to control the relative importance assigned to collision avoidance with respect to the other phenomena affecting the agent's dynamics. We carried out numerical experiments on a self-organising swarm of drones aimed at fighting wildfires autonomously. As expected, it has been found that the collision rate can be reduced either by decreasing the cruise speed of the agents and/or by increasing the sampling frequency of the global signal strength field. A convenient by-product of the proposed collision-avoidance algorithm is that it helps maintain diversity in the swarm, thus enhancing exploration.
Particle Swarms Reformulated towards a Unified and Flexible Framework
Apr 26, 2021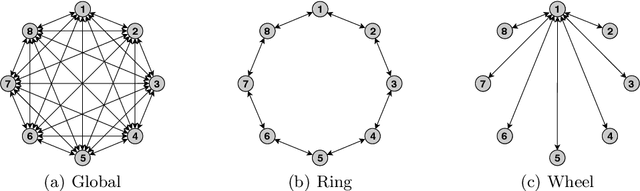
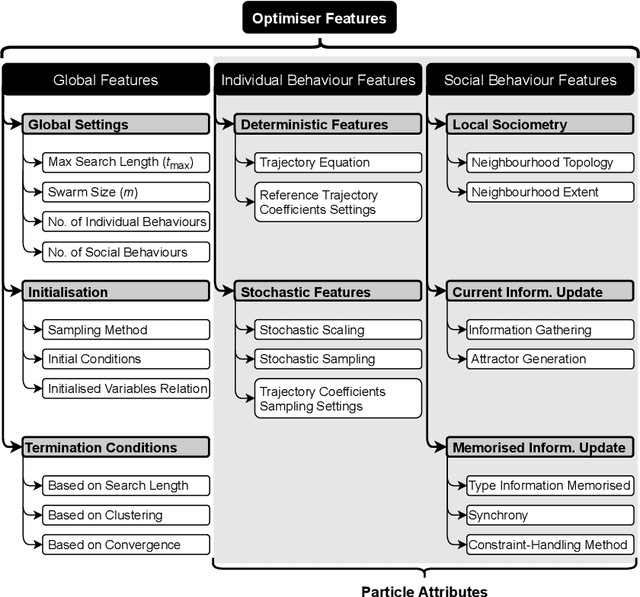
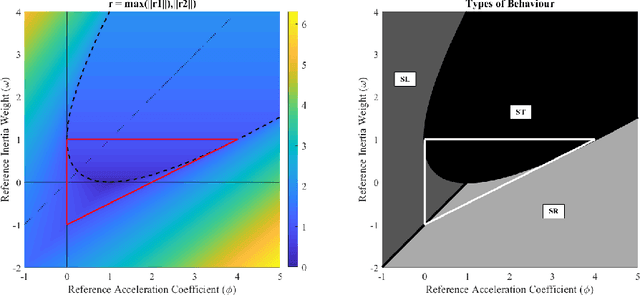
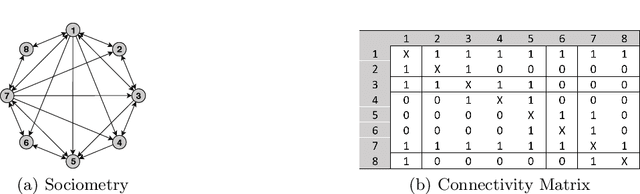
The Particle Swarm Optimisation (PSO) algorithm has undergone countless modifications and adaptations since its original formulation in 1995. Some of these have become mainstream whereas many others have not been adopted and faded away. Thus, a myriad of alternative formulations have been proposed to the extent that the question arises as to what the basic features of an algorithm must be to belong in the PSO family. The aim of this paper is to establish what defines a PSO algorithm and to attempt to formulate it in such a way that it encompasses many existing variants. Therefore, different versions of the method may be posed as settings within the proposed unified framework. In addition, the proposed formulation generalises, decouples and incorporates features to the method providing more flexibility to the behaviour of each particle. The closed forms of the trajectory difference equation are obtained, different types of behaviour are identified, stochasticity is decoupled, and traditionally global features such as sociometries and constraint-handling are re-defined as particle's attributes.
* Preprint The final authenticated article will be published by Springer-Nature in the Lecture Notes in Computer Science series. This research will be presented at the Twelfth International Conference on Swarm Intelligence (ICSI 2021)