 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAS2FM: Enabling Statistical Model Checking of ROS 2 Systems for Robust Autonomy
Aug 26, 2025



Designing robotic systems to act autonomously in unforeseen environments is a challenging task. This work presents a novel approach to use formal verification, specifically Statistical Model Checking (SMC), to verify system properties of autonomous robots at design-time. We introduce an extension of the SCXML format, designed to model system components including both Robot Operating System 2 (ROS 2) and Behavior Tree (BT) features. Further, we contribute Autonomous Systems to Formal Models (AS2FM), a tool to translate the full system model into JANI. The use of JANI, a standard format for quantitative model checking, enables verification of system properties with off-the-shelf SMC tools. We demonstrate the practical usability of AS2FM both in terms of applicability to real-world autonomous robotic control systems, and in terms of verification runtime scaling. We provide a case study, where we successfully identify problems in a ROS 2-based robotic manipulation use case that is verifiable in less than one second using consumer hardware. Additionally, we compare to the state of the art and demonstrate that our method is more comprehensive in system feature support, and that the verification runtime scales linearly with the size of the model, instead of exponentially.
Optimized Execution of PDDL Plans using Behavior Trees
Jan 11, 2021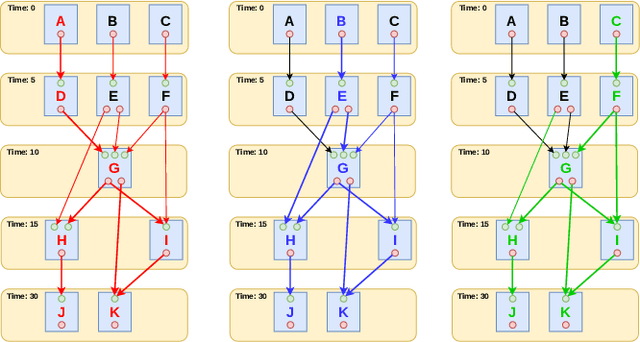
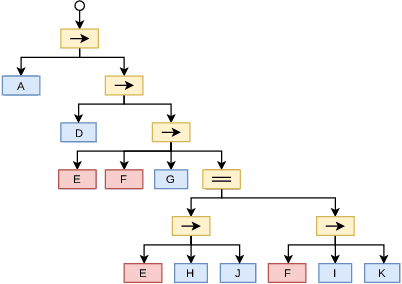
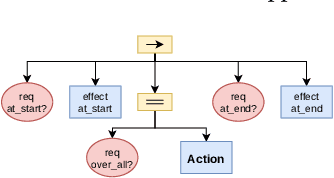
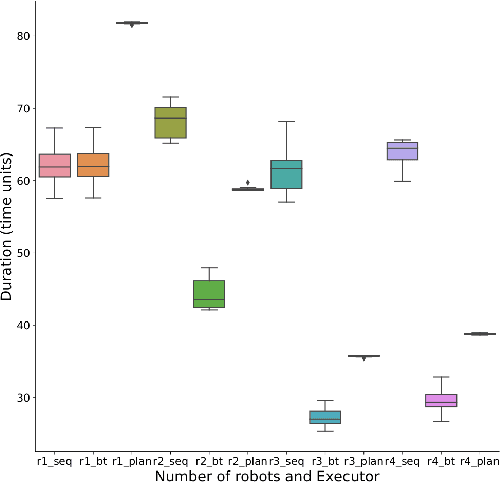
Robots need task planning to sequence and execute actions toward achieving their goals. On the other hand, Behavior Trees provide a mathematical model for specifying plan execution in an intrinsically composable, reactive, and robust way. PDDL (Planning Domain Definition Language) has become the standard description language for most planners. In this paper, we present a novel algorithm to systematically create behavior trees from PDDL plans to execute them. This approach uses the execution graph of the plan to generate a behavior tree. The most remarkable contribution of this approach is the algorithm to build a Behavior Tree that optimizes its execution by paralyzing actions, applicable to any plan, taking into account the actions' causal relationships. We demonstrate the improvement in the execution of plans in mobile robots using the ROS2 Planning System framework.