 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Classification of Critical Configurations for any Number of Projective Views
Jan 07, 2024Structure from motion is the process of recovering information about cameras and 3D scene from a set of images. Generally, in a noise-free setting, all information can be uniquely recovered if enough images and image points are provided. There are, however, certain cases where unique recovery is impossible, even in theory; these are called critical configurations. We use a recently developed algebraic approach to classify all critical configurations for any number of projective cameras. We show that they form well-known algebraic varieties, such as quadric surfaces and curves of degree at most 4. This paper also improves upon earlier results both by finding previously unknown critical configurations and by showing that some configurations previously believed to be critical are in fact not.
Critical configurations for three projective views
Dec 10, 2021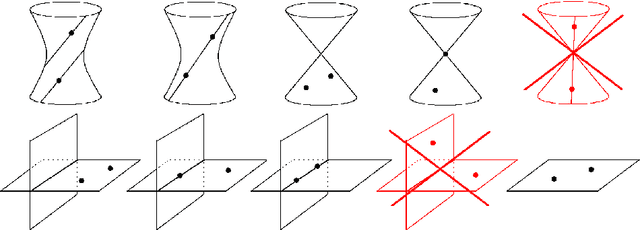
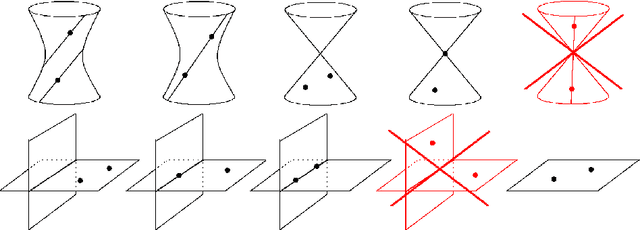
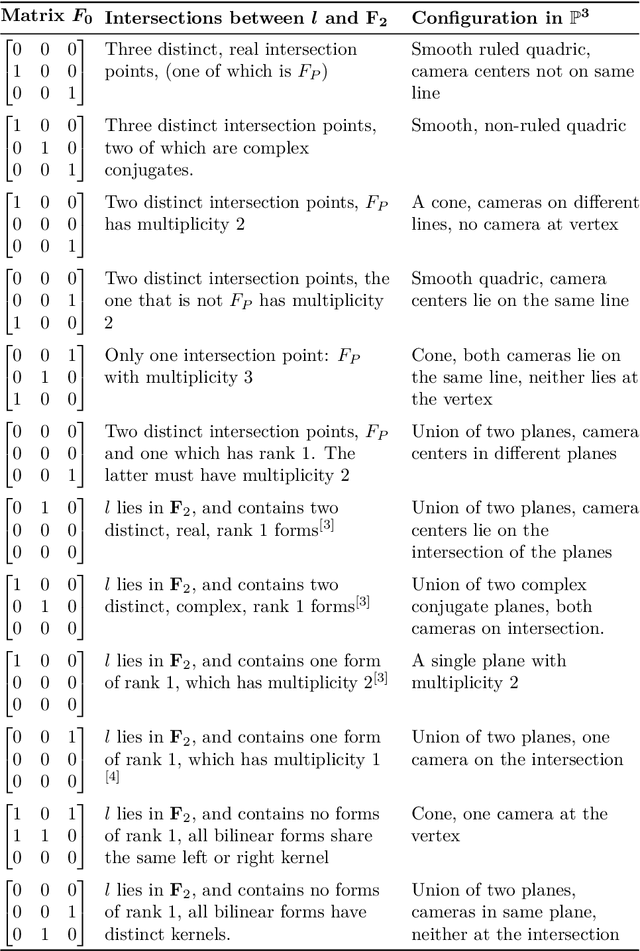
The problem of structure from motion is concerned with recovering the 3-dimensional structure of an object from a set of 2-dimensional images. Generally, all information can be uniquely recovered if enough images and image points are provided, yet there are certain cases where unique recovery is impossible; these are called critical configurations. In this paper we use an algebraic approach to study the critical configurations for three projective cameras. We show that all critical configurations lie on the intersection of quadric surfaces, and classify exactly which intersections constitute a critical configuration.
Critical configurations for two projective views, a new approach
Dec 09, 2021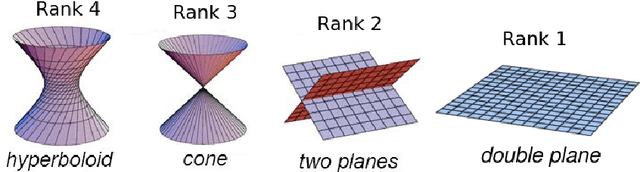
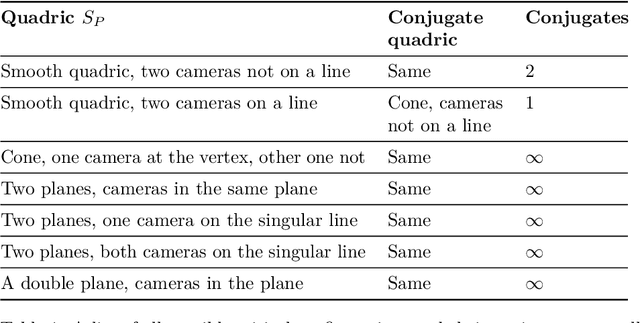
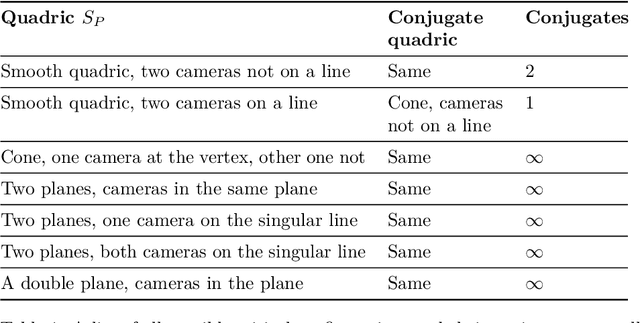
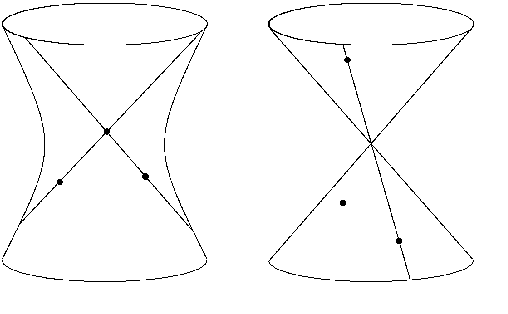
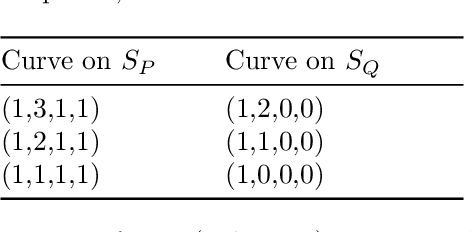
The problem of structure from motion is concerned with recovering 3-dimensional structure of an object from a set of 2-dimensional images. Generally, all information can be uniquely recovered if enough images and image points are provided, but there are certain cases where unique recovery is impossible; these are called critical configurations. In this paper we use an algebraic approach to study the critical configurations for two projective cameras. We show that all critical configurations lie on quadric surfaces, and classify exactly which quadrics constitute a critical configuration. The paper also describes the relation between the different reconstructions when unique reconstruction is impossible.