Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpace-Time Finite Element for Sensor Fusion
Jul 19, 2021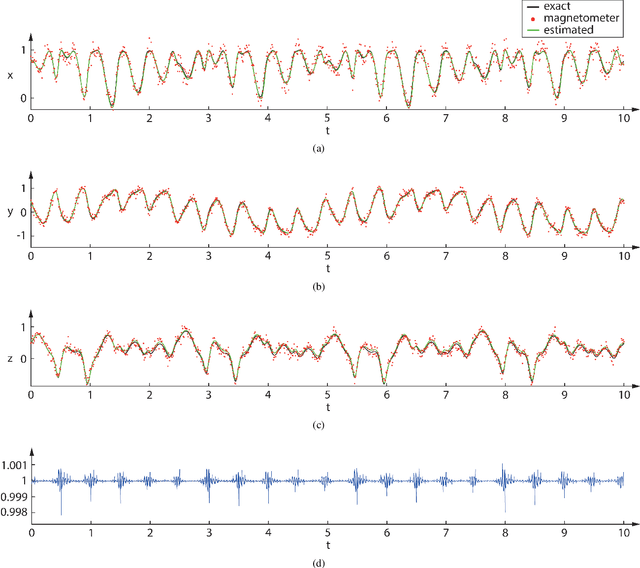
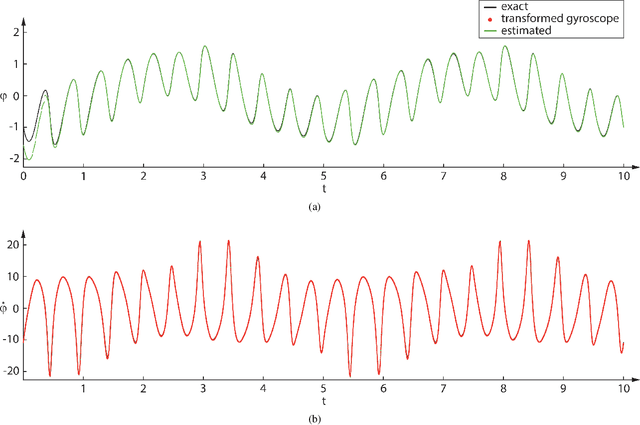
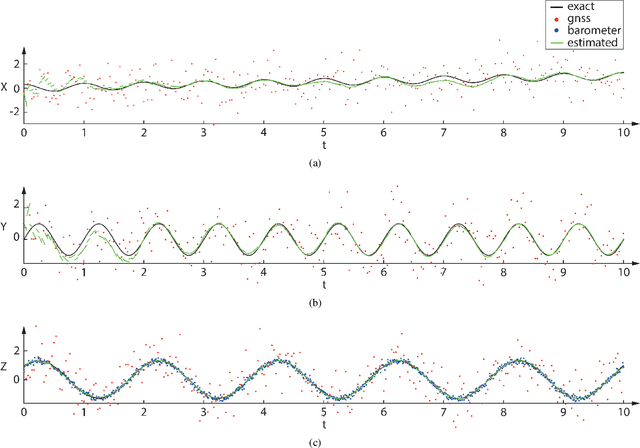
Drones estimate their position and orientation with the help of various sensors. Their data streams, that differ with respect to the sampling rate and standard deviation, need to be fused to get an accurate position and orientation estimate. It is subsequently shown that a nonlinear space-time finite element and static condensation can be used to accomplish this task. This is done, for the sake of clarity, in three stages. The first stage estimates the local magnetic north vector with the help of magnetometers and gyroscopes. The second stage projects the remaining sensor data onto the plane that is orthogonal to the local magnetic north vector and the third stage solves the corresponding two-dimensional problem.
* 12 pages, 3 figures
Via