 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUser profile-driven large-scale multi-agent learning from demonstration in federated human-robot collaborative environments
Mar 30, 2021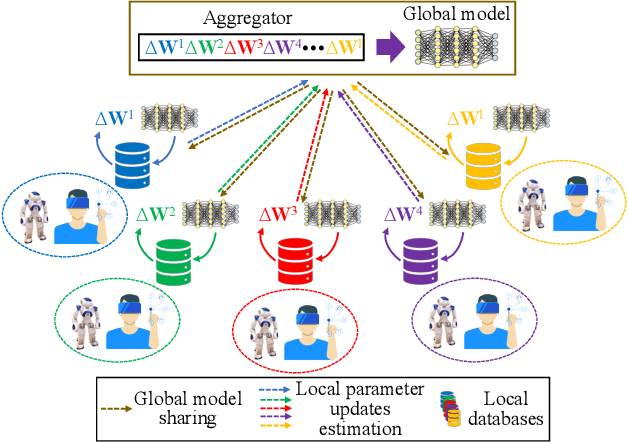
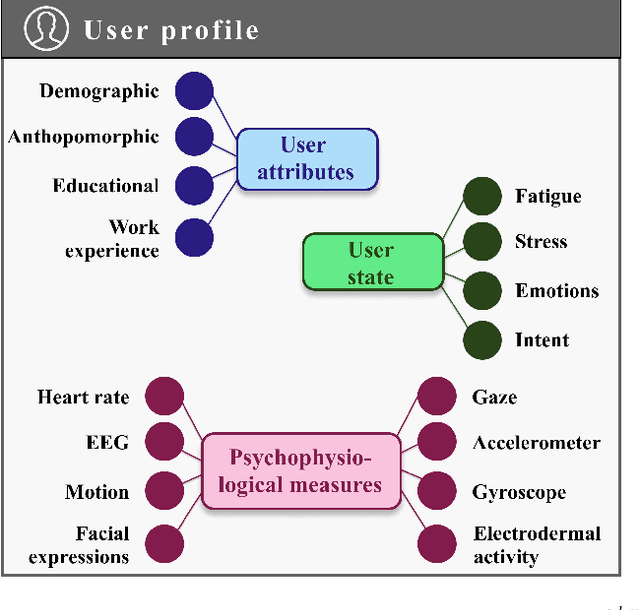
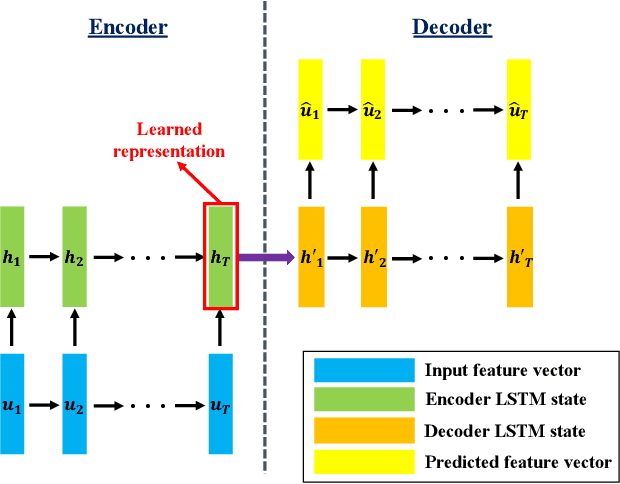
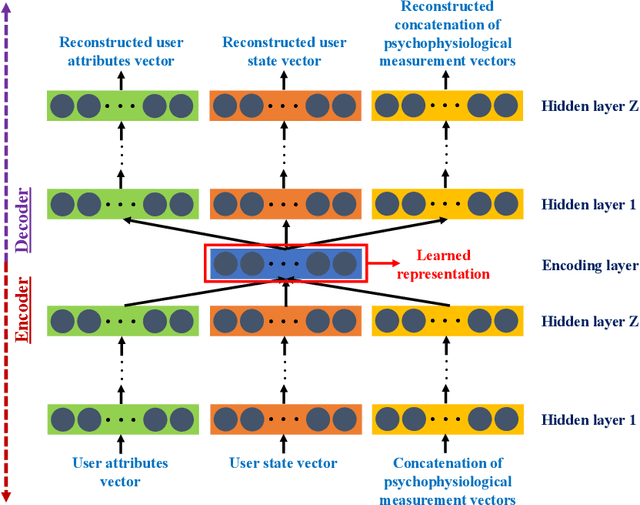
Learning from Demonstration (LfD) has been established as the dominant paradigm for efficiently transferring skills from human teachers to robots. In this context, the Federated Learning (FL) conceptualization has very recently been introduced for developing large-scale human-robot collaborative environments, targeting to robustly address, among others, the critical challenges of multi-agent learning and long-term autonomy. In the current work, the latter scheme is further extended and enhanced, by designing and integrating a novel user profile formulation for providing a fine-grained representation of the exhibited human behavior, adopting a Deep Learning (DL)-based formalism. In particular, a hierarchically organized set of key information sources is considered, including: a) User attributes (e.g. demographic, anthropomorphic, educational, etc.), b) User state (e.g. fatigue detection, stress detection, emotion recognition, etc.) and c) Psychophysiological measurements (e.g. gaze, electrodermal activity, heart rate, etc.) related data. Then, a combination of Long Short-Term Memory (LSTM) and stacked autoencoders, with appropriately defined neural network architectures, is employed for the modelling step. The overall designed scheme enables both short- and long-term analysis/interpretation of the human behavior (as observed during the feedback capturing sessions), so as to adaptively adjust the importance of the collected feedback samples when aggregating information originating from the same and different human teachers, respectively.
Towards open and expandable cognitive AI architectures for large-scale multi-agent human-robot collaborative learning
Dec 15, 2020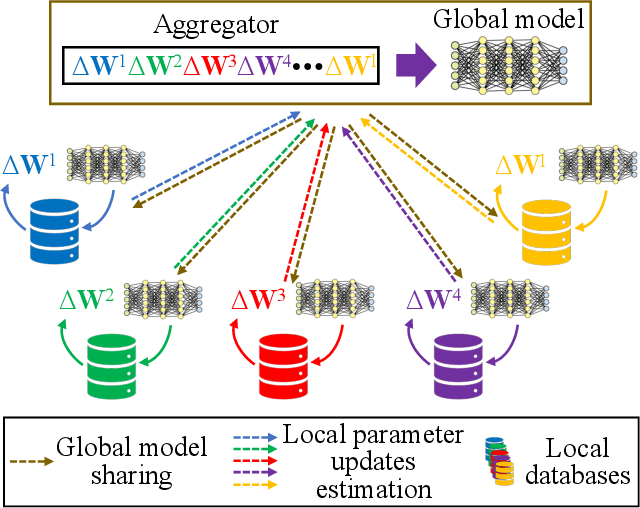
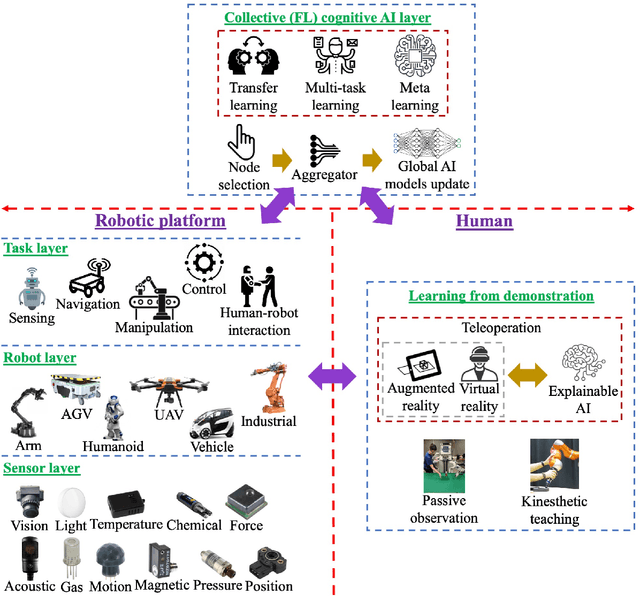
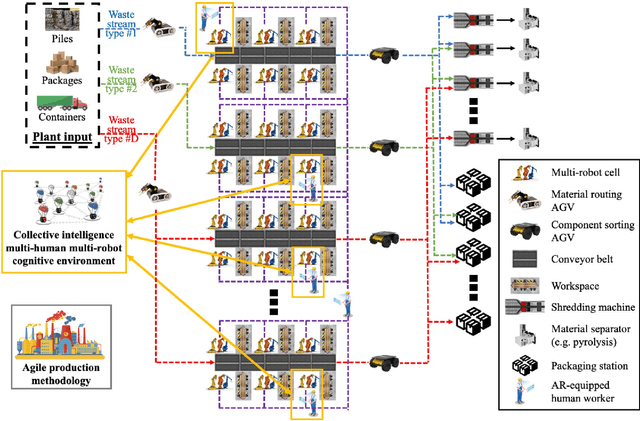
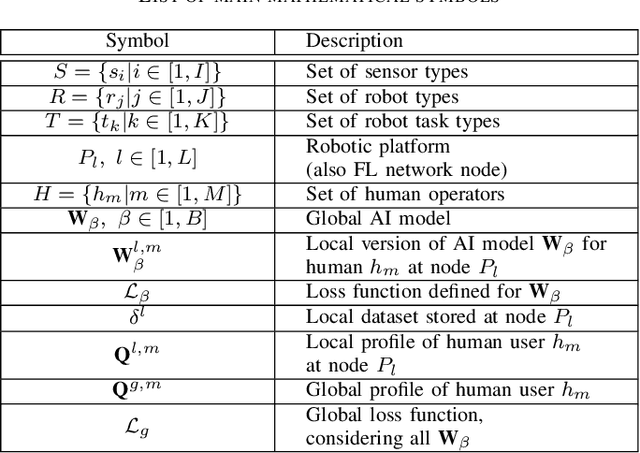
Learning from Demonstration (LfD) constitutes one of the most robust methodologies for constructing efficient cognitive robotic systems. Current key challenges in the field include those of multi-agent learning and long-term autonomy. Towards this direction, a novel cognitive architecture for multi-agent LfD robotic learning is introduced in this paper, targeting to enable the reliable deployment of open, scalable and expandable robotic systems in large-scale and complex environments. In particular, the designed architecture capitalizes on the recent advances in the Artificial Intelligence (AI) (and especially the Deep Learning (DL)) field, by establishing a Federated Learning (FL)-based framework for incarnating a multi-human multi-robot collaborative learning environment. The fundamental conceptualization relies on employing multiple AI-empowered cognitive processes (implementing various robotic tasks) that operate at the edge nodes of a network of robotic platforms, while global AI models (underpinning the aforementioned robotic tasks) are collectively created and shared among the network, by elegantly combining information from a large number of human-robot interaction instances. Pivotal novelties of the designed cognitive architecture include: a) it introduces a new FL-based formalism that extends the conventional LfD learning paradigm to support large-scale multi-agent operational settings, b) it elaborates previous FL-based self-learning robotic schemes so as to incorporate the human in the learning loop, and c) it consolidates the fundamental principles of FL with additional sophisticated AI-enabled learning methodologies for modelling the multi-level inter-dependencies among the robotic tasks. The applicability of the proposed framework is explained using an example of a real-world industrial case study for agile production-based Critical Raw Materials (CRM) recovery.