 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputer vision training dataset generation for robotic environments using Gaussian splatting
Dec 15, 2025This paper introduces a novel pipeline for generating large-scale, highly realistic, and automatically labeled datasets for computer vision tasks in robotic environments. Our approach addresses the critical challenges of the domain gap between synthetic and real-world imagery and the time-consuming bottleneck of manual annotation. We leverage 3D Gaussian Splatting (3DGS) to create photorealistic representations of the operational environment and objects. These assets are then used in a game engine where physics simulations create natural arrangements. A novel, two-pass rendering technique combines the realism of splats with a shadow map generated from proxy meshes. This map is then algorithmically composited with the image to add both physically plausible shadows and subtle highlights, significantly enhancing realism. Pixel-perfect segmentation masks are generated automatically and formatted for direct use with object detection models like YOLO. Our experiments show that a hybrid training strategy, combining a small set of real images with a large volume of our synthetic data, yields the best detection and segmentation performance, confirming this as an optimal strategy for efficiently achieving robust and accurate models.
Similarity and symmetry measures based on fuzzy descriptors of image objects` composition
Jul 28, 2021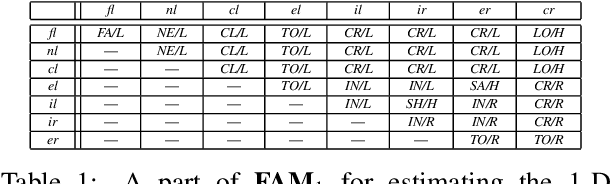
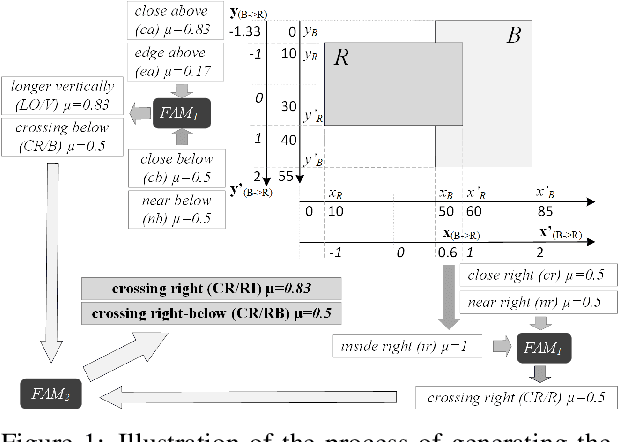
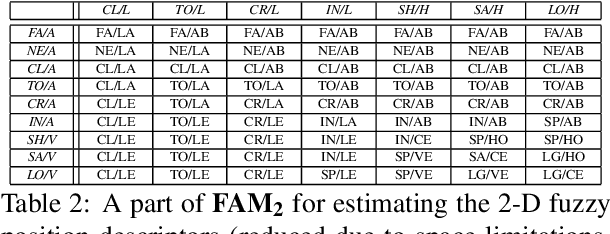
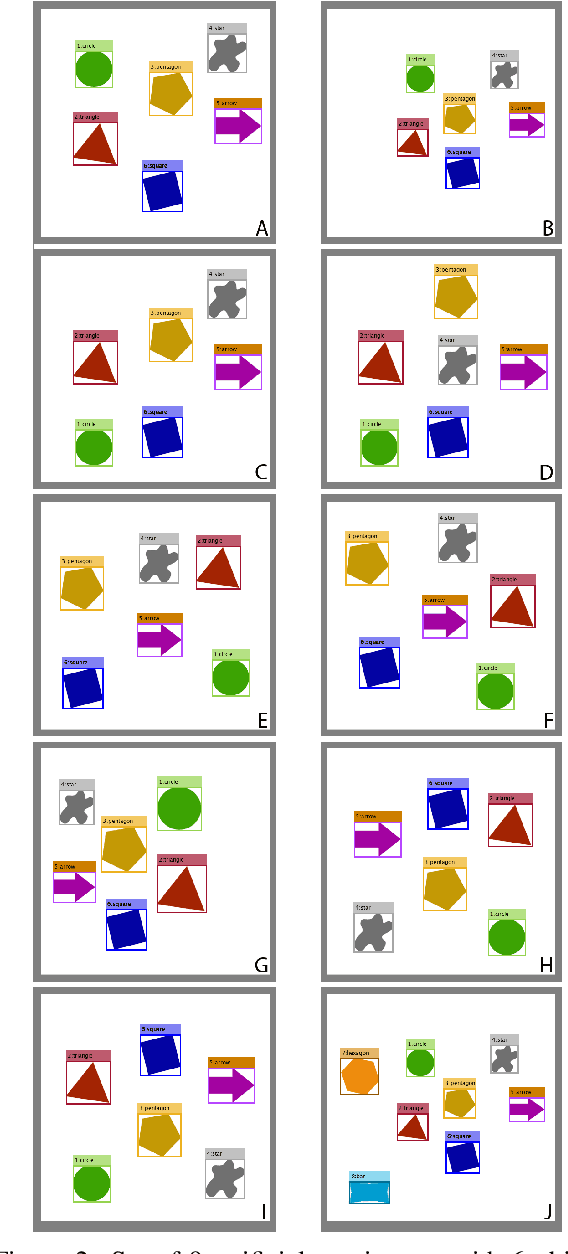
The paper describes a method for measuring the similarity and symmetry of an image annotated with bounding boxes indicating image objects. The latter representation became popular recently due to the rapid development of fast and efficient deep-learning-based object-detection methods. The proposed approach allows for comparing sets of bounding boxes to estimate the degree of similarity of their underlying images. It is based on the fuzzy approach that uses the fuzzy mutual position (FMP) matrix to describe spatial composition and relations between bounding boxes within an image. A method of computing the similarity of two images described by their FMP matrices is proposed and the algorithm of its computation. It outputs the single scalar value describing the degree of content-based image similarity. By modifying the method`s parameters, instead of similarity, the reflectional symmetry of object composition may also be measured. The proposed approach allows for measuring differences in objects` composition of various intensities. It is also invariant to translation and scaling and - in case of symmetry detection - position and orientation of the symmetry axis. A couple of examples illustrate the method.
* 10 pages