 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOntology-Driven Robotic Specification Synthesis
Feb 05, 2026This paper addresses robotic system engineering for safety- and mission-critical applications by bridging the gap between high-level objectives and formal, executable specifications. The proposed method, Robotic System Task to Model Transformation Methodology (RSTM2) is an ontology-driven, hierarchical approach using stochastic timed Petri nets with resources, enabling Monte Carlo simulations at mission, system, and subsystem levels. A hypothetical case study demonstrates how the RSTM2 method supports architectural trades, resource allocation, and performance analysis under uncertainty. Ontological concepts further enable explainable AI-based assistants, facilitating fully autonomous specification synthesis. The methodology offers particular benefits to complex multi-robot systems, such as the NASA CADRE mission, representing decentralized, resource-aware, and adaptive autonomous systems of the future.
Analysis of Robotic System Models Through Property Inheritance from Petri Net Meta-models
Jul 11, 2024This article investigates the analysis of robotic system models using the Robotic System Hierarchic Petri Net (RSHPN) meta-model, proposing streamlined methods by focusing on significant system fragments and inheriting properties from the meta-model. Our research demonstrates that it is feasible to: 1) effectively analyze complex robotic systems expressed using RSHPN, and 2) enable models to inherit properties from the meta-model. This approach significantly simplifies the analysis process, reduces design time, and ensures the safety and reliability of the systems. These aspects are crucial for robots operating in human environments. Our results suggest that Petri nets could be further explored as a useful tool for the formal description and in-depth analysis of the properties of robotic systems.
Methodology of Designing Multi-agent Robot Control Systems Utilising Hierarchical Petri Nets
Jun 28, 2019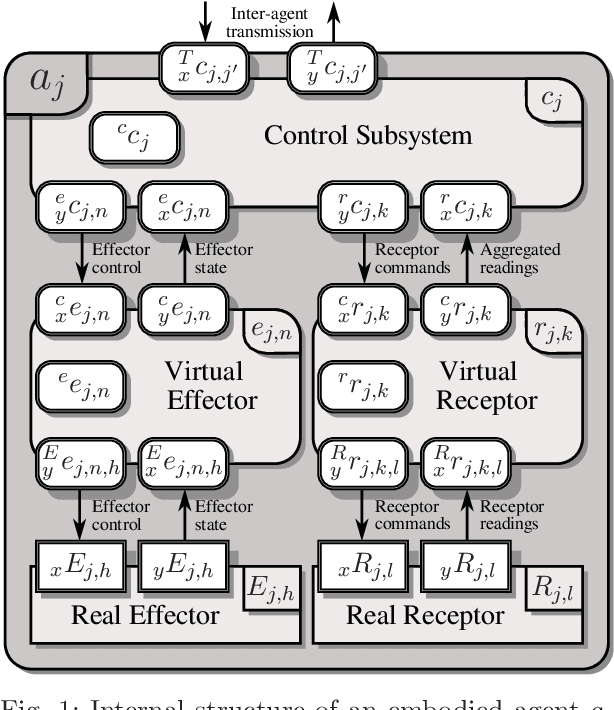
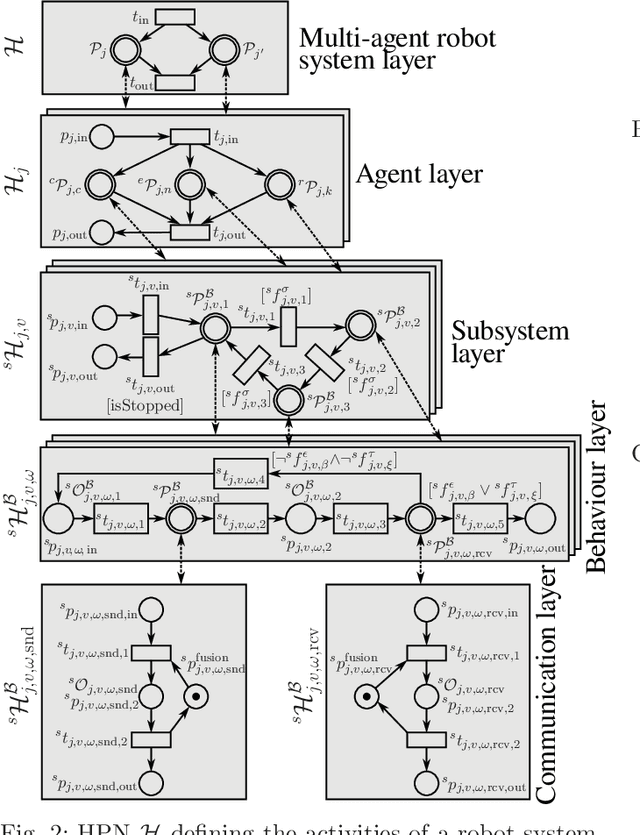
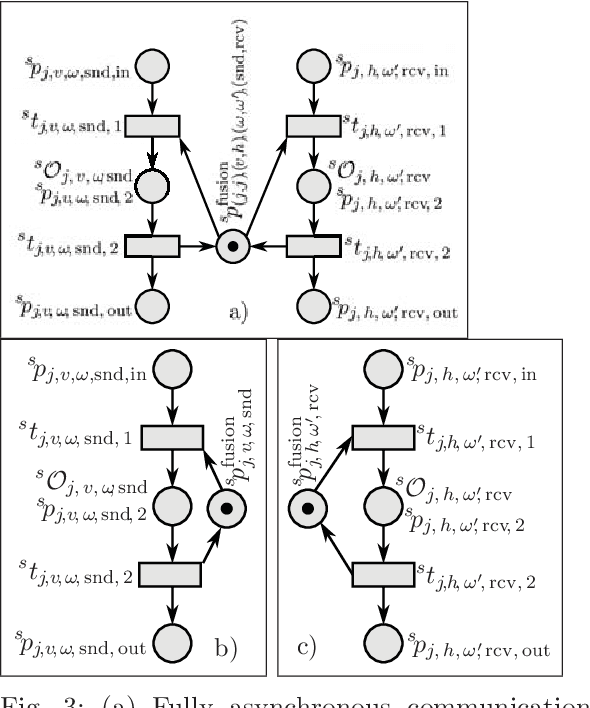
A robot system is designed as a set of embodied agents. An embodied agent is decomposed into cooperating subsystems. In our previous work activities of subsystems were defined by hierarchical finite state machines. With their states, activities were associated. In that approach communication between subsystems was treated as an implementation issue. This paper represents the activities of a robot system using hierarchical Petri nets with conditions. Such net is created by specifying consecutive layers: multi-agent robot system layer, agent layer, subsystem layer, behaviour layer and communication layer. This decomposition not only organizes in a systematic manner the development of a robot system but also introduces a comprehensive description of concurrently acting subsystems. Based on those theoretical considerations, a tool was created for producing hierarchical Petri nets defining the model of a robotic system and enabling automatic generation of the robot controller code, resulting in a significant acceleration of the implementation phase. The capabilities of the tool are presented by the development of a robot controller performing a rudimentary task.