 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a Robot-Assisted Chemical Dialysis System
Mar 10, 2026Scientists perform diverse manual procedures that are tedious and laborious. Such procedures are considered a bottleneck for modern experimental science, as they consume time and increase burdens in fields including material science and medicine. We employ a user-centered approach to designing a robot-assisted system for dialysis, a common multi-day purification method used in polymer and protein synthesis. Through two usability studies, we obtain participant feedback and revise design requirements to develop the final system that satisfies scientists' needs and has the potential for applications in other experimental workflows. We anticipate that integration of this system into real synthesis procedures in a chemical wet lab will decrease workload on scientists during long experimental procedures and provide an effective approach to designing more systems that have the potential to accelerate scientific discovery and liberate scientists from tedious labor.
Generating Executable Action Plans with Environmentally-Aware Language Models
Oct 10, 2022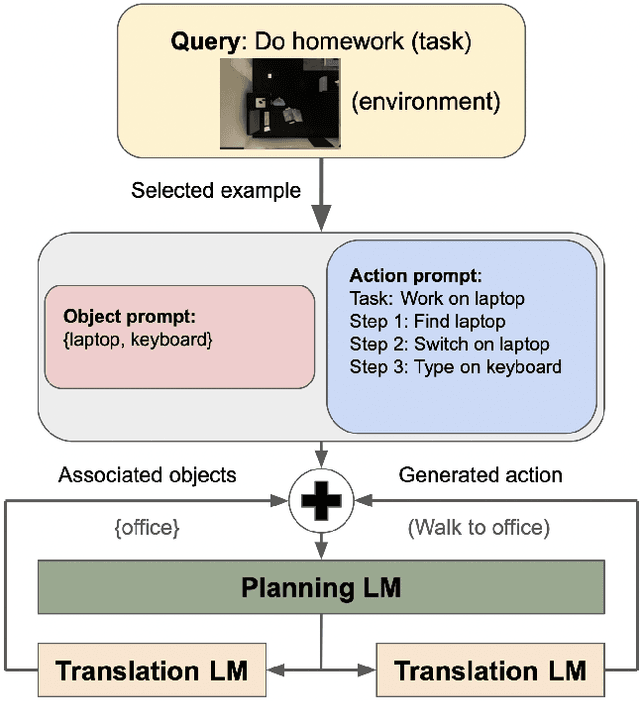
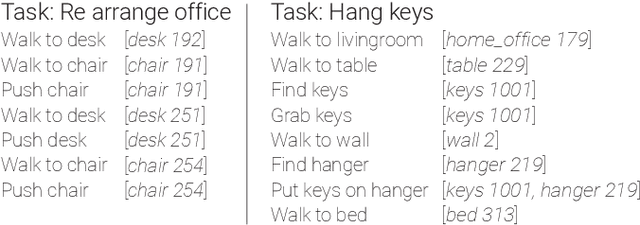
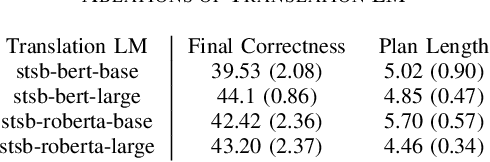
Large Language Models (LLMs) trained using massive text datasets have recently shown promise in generating action plans for robotic agents from high level text queries. However, these models typically do not consider the robot's environment, resulting in generated plans that may not actually be executable due to ambiguities in the planned actions or environmental constraints. In this paper, we propose an approach to generate environmentally-aware action plans that can be directly mapped to executable agent actions. Our approach involves integrating environmental objects and object relations as additional inputs into LLM action plan generation to provide the system with an awareness of its surroundings, resulting in plans where each generated action is mapped to objects present in the scene. We also design a novel scoring function that, along with generating the action steps and associating them with objects, helps the system disambiguate among object instances and take into account their states. We evaluate our approach using the VirtualHome simulator and the ActivityPrograms knowledge base. Our results show that the action plans generated from our system outperform prior work in terms of their correctness and executability by 5.3% and 8.9% respectively.