 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagnetoreological spring as element of vibration control system of dynamicly active equipment for biofuel production
Jan 19, 2023The development of vibration protection systems that ensure efficiency and safety in the operation of process equipment and pipelines is one of the main tasks of controlling the dynamic state of machines. One of the effective methods of vibration isolation of the equipment of these installations is the use of vibration mounts. Today, both passive and active methods of extinguishing are actively used. The combination of two methods of damping will ensure the stability and adaptability of vibration protection systems to the operating conditions of process equipment. The paper presents and investigates the device of a hybrid vibration support, including a magnetorheological spring, as an element of vibration damping. A distinctive feature of the vibration mount is an extended range of performance and reduced wear rate of the components. An analysis of the damping characteristics of a hybrid vibration support in passive and active modes of operation is presented. A simulation model of the vibration support under consideration has been developed in the MATLAB Simulink simulation environment using the PIB controller. The simulation results indicate the effectiveness of the use of vibration damping systems with a magnetorheological spring in conjunction with various technological equipment.
Formulation of problems of combinatorial optimization for solving problems of management and planning of cloud production
Dec 05, 2022The application of combinatorial optimization problems to solving the problems of planning processes for industries based on a fund of reconfigurable production resources is considered. The results of their solution by mixed integer programming methods are presented.
Robot-printer for creating elements of technological equipment for the production of components of biofuel compositions
Feb 02, 2022This study is devoted to the search for new scientific and technical solutions in the field of renewable energy sources, in particular biofuels. Biomass is the main fuel for green energy, accounting for two thirds of the energy produced from renewable sources. The further development of the industry depends on the improvement of the equipment and technologies used in it. On the example of a cleaning apparatus, a new technology for prototyping its parts using a robotic module is shown and tested. The use of plastics as parts of technological equipment is a modern trend and may be due to the low adhesion strength of various substances to the surface of these parts due to poor wettability and low values of the surface energy of these materials compared to metals.
Choice of technology and evaluation of the production capabilities of a 3d printer robot for creating elements of experimental equipment for the production of biofuel components
Feb 02, 2022Elements of experimental equipment for the production of biofuel components must meet high reliability and safety requirements. At the same time, in the course of research on the subject of creating equipment for the production of biofuels, a variable range of equipment is regularly proposed and should be checked. The manufacture of elements of such equipment by traditional methods is expensive and inefficient, time-consuming, which negatively affects the speed of scientific research. To this end, it is proposed to develop a robotic 3D printing complex that provides maximum flexibility in creating mock-ups and test samples of equipment for the production of biofuel components. The article discusses the experience of successfully creating equipment elements for the production of fuels using 3d printing. Next, the choice of a robotization scheme for a 3D printing installation is described and the choice of printing technology is substantiated. The article also presents the results of calculating the parameters of the 3v-printer robot and the results of calculating the similarity parameters for the implementation and evaluation of control algorithms. The results of a numerical experiment for calculating the strength characteristics of equipment elements manufactured using the selected 3d printing technology are presented.
Problem of robotic precision cutting of the geometrically complex shape from an irregular honeycomb grid
Aug 19, 2020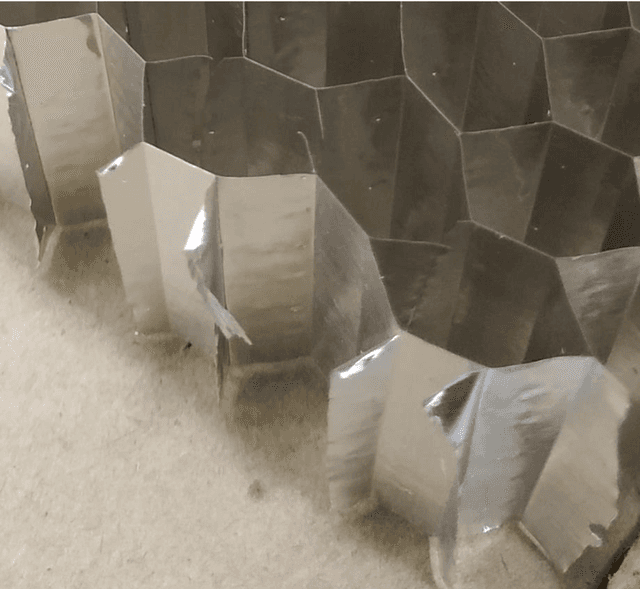
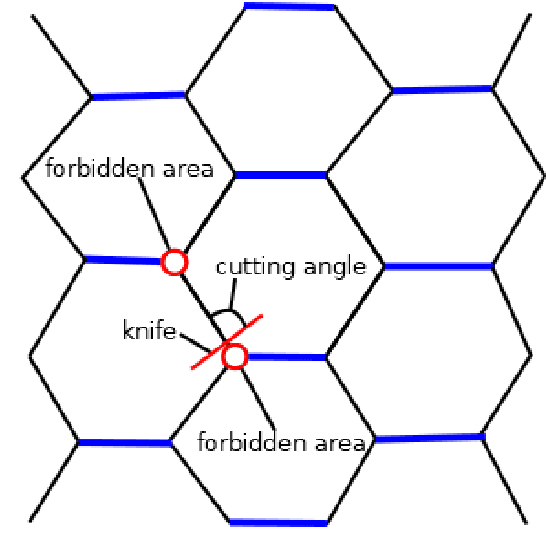
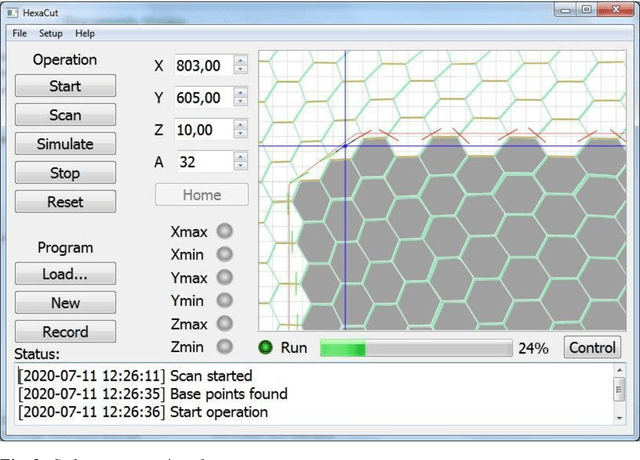
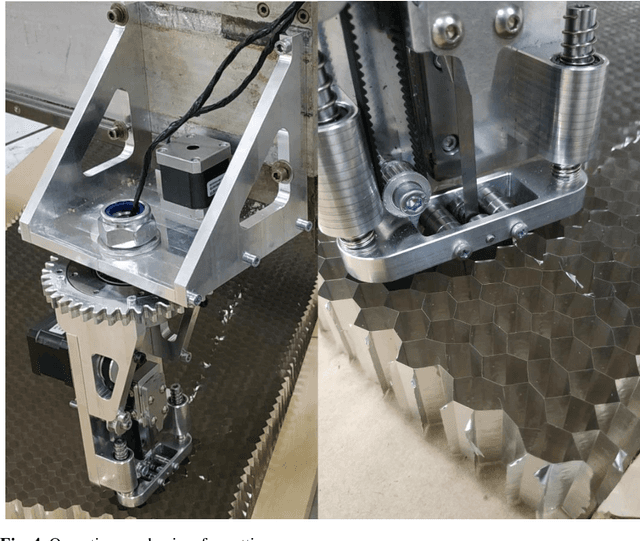
The article considers solving the problem of precision cutting of honeycomb blocks. The urgency of using arbitrary shapes application cutting from honey-comb blocks made of modern composite materials is substantiated. The problem is to obtain a cut of the given shape from honeycomb blocks. The complexity of this problem is in the irregular pattern of honeycomb blocks and the presence of double edges, which forces an operator to scan each block before cutting. It is necessary to take into account such restrictions as the place and angle of the cut and size of the knife, its angle when cutting and the geometry of cells. For this problem solving, a robotic complex has been developed. It includes a device for scanning the geometry of a honeycomb block, software for cutting automation and a cutting device itself. The software takes into account all restrictions on the choice of the location and angle of the operating mechanism. It helps to obtain the highest quality cut and a cut shape with the best strength characteristics. An actu-ating device has been developed and implemented for both scanning and cutting of honeycomb blocks directly. The necessary tests were carried out on real alu-minum honeycomb blocks. Some technical solutions are used in the cutting de-vice to improve the quality of cutting honeycomb blocks. The tests have shown the effectiveness of the proposed complex. Robotic planar cutting made it possi-ble to obtain precise cutting with a high degree of repeatability.