 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReason and Verify: A Framework for Faithful Retrieval-Augmented Generation
Mar 10, 2026Retrieval-Augmented Generation (RAG) significantly improves the factuality of Large Language Models (LLMs), yet standard pipelines often lack mechanisms to verify inter- mediate reasoning, leaving them vulnerable to hallucinations in high-stakes domains. To address this, we propose a domain-specific RAG framework that integrates explicit rea- soning and faithfulness verification. Our architecture augments standard retrieval with neural query rewriting, BGE-based cross-encoder reranking, and a rationale generation module that grounds sub-claims in specific evidence spans. We further introduce an eight-category verification taxonomy that enables fine-grained assessment of rationale faithfulness, distinguishing between explicit and implicit support patterns to facilitate structured error diagnosis. We evaluate this framework on the BioASQ and PubMedQA benchmarks, specifically analyzing the impact of dynamic in-context learning and rerank- ing under constrained token budgets. Experiments demonstrate that explicit rationale generation improves accuracy over vanilla RAG baselines, while dynamic demonstration selection combined with robust reranking yields further gains in few-shot settings. Using Llama-3-8B-Instruct, our approach achieves 89.1% on BioASQ-Y/N and 73.0% on Pub- MedQA, competitive with systems using significantly larger models. Additionally, we perform a pilot study combining human expert assessment with LLM-based verification to explore how explicit rationale generation improves system transparency and enables more detailed diagnosis of retrieval failures in biomedical question answering.
DREAMS: Drilling and Extraction Automated System
Jun 09, 2021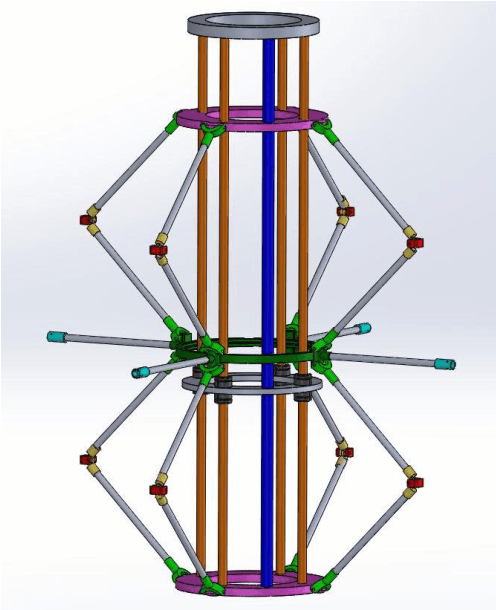
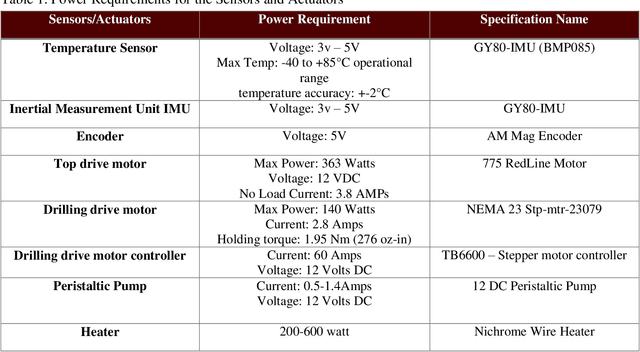
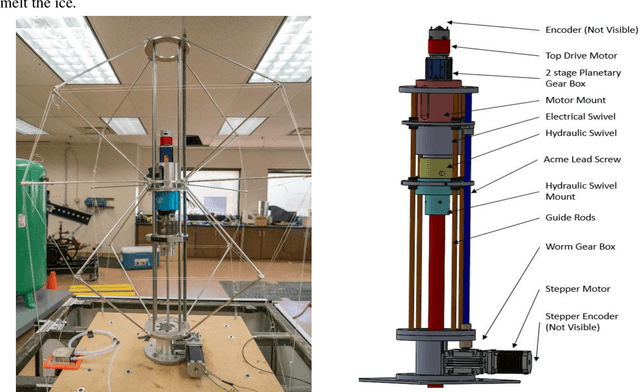
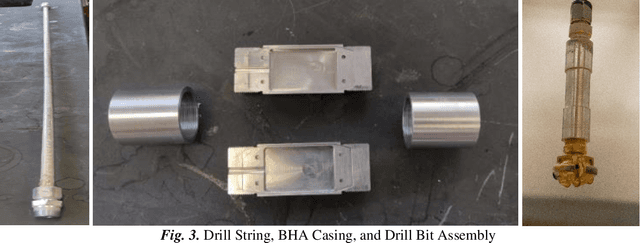
Drilling and Extraction Automated System (DREAMS) is a fully automated prototype-drilling rig that can drill, extract water and assess subsurface density profiles from simulated lunar and Martian subsurface ice. DREAMS system is developed by the Texas A&M drilling automation team and composed of four main components: 1- tensegrity rig structure, 2- drilling system, 3- water extracting and heating system, and 4- electronic hardware, controls, and machine algorithm. The vertical and rotational movements are controlled by using an Acme rod, stepper, and rotary motor. DREAMS is a unique system and different from other systems presented before in the NASA Rascal-Al competition because 1- It uses the tensegrity structure concept to decrease the system weight, improve mobility, and easier installation in space. 2- It cuts rock layers by using a short bit length connected to drill pipes. This drilling methodology is expected to drill hundreds and thousands of meters below the moon and Martian surfaces without any anticipated problems (not only 1 m.). 3- Drilling, heating, and extraction systems are integrated into one system that can work simultaneously or individually to save time and cost.