 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSat-JEPA-Diff: Bridging Self-Supervised Learning and Generative Diffusion for Remote Sensing
Mar 14, 2026Predicting satellite imagery requires a balance between structural accuracy and textural detail. Standard deterministic methods like PredRNN or SimVP minimize pixel-based errors but suffer from the "regression to the mean" problem, producing blurry outputs that obscure subtle geographic-spatial features. Generative models provide realistic textures but often misleadingly reveal structural anomalies. To bridge this gap, we introduce Sat-JEPA-Diff, which combines Self-Supervised Learning (SSL) with Hidden Diffusion Models (LDM). An IJEPA module predicts stable semantic representations, which then route a frozen Stable Diffusion backbone via a lightweight cross-attention adapter. This ensures that the synthesized high-accuracy textures are based on absolutely accurate structural predictions. Evaluated on a global Sentinel-2 dataset, Sat-JEPA-Diff excels at resolving sharp boundaries. It achieves leading perceptual scores (GSSIM: 0.8984, FID: 0.1475) and significantly outperforms deterministic baselines, despite standard autoregressive stability limits. The code and dataset are publicly available on https://github.com/VU-AIML/SAT-JEPA-DIFF.
* ICLR 2026 Workshop ML4RS Main Track: https://openreview.net/forum?id=WBHfQLbgZR
Topological Navigation Graph
Oct 15, 2019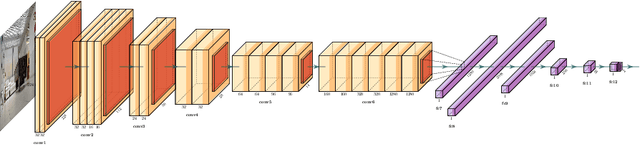
In this article, we focus on the utilisation of reactive trajectory imitation controllers for goal-directed mobile robot navigation. We propose a topological navigation graph (TNG) - an imitation-learning-based framework for navigating through environments with intersecting trajectories. The TNG framework represents the environment as a directed graph composed of deep neural networks. Each vertex of the graph corresponds to a trajectory and is represented by a trajectory identification classifier and a trajectory imitation controller. For trajectory following, we propose the novel use of neural object detection architectures. The edges of TNG correspond to intersections between trajectories and are all represented by a classifier. We provide empirical evaluation of the proposed navigation framework and its components in simulated and real-world environments, demonstrating that TNG allows us to utilise non-goal-directed, imitation-learning methods for goal-directed autonomous navigation.