Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Social Robotic Navigation approaches: CNN Encoder and Incremental Learning as an alternative to Deep Reinforcement Learning
Sep 05, 2020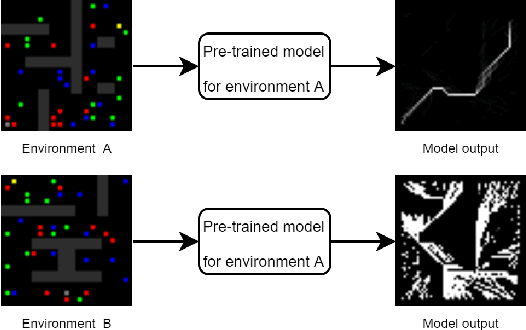
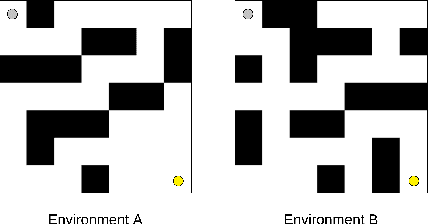
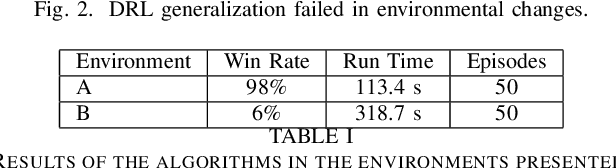
Dealing with social tasks in robotic scenarios is difficult, as having humans in the learning loop is incompatible with most of the state-of-the-art machine learning algorithms. This is the case when exploring Incremental learning models, in particular the ones involving reinforcement learning. In this work, we discuss this problem and possible solutions by analysing a previous study on adaptive convolutional encoders for a social navigation task.
Via