 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOutlier-Robust Nonlinear Moving Horizon Estimation using Adaptive Loss Functions
Apr 06, 2026In this work, we propose an adaptive robust loss function framework for MHE, integrating an adaptive robust loss function to reduce the impact of outliers with a regularization term that avoids naive solutions. The proposed approach prioritizes the fitting of uncontaminated data and downweights the contaminated ones. A tuning parameter is incorporated into the framework to control the shape of the loss function for adjusting the estimator's robustness to outliers. The simulation results demonstrate that adaptation occurs in just a few iterations, whereas the traditional behaviour $\mathrm{L_2}$ predominates when the measurements are free of outliers.
3D printer-controlled syringe pumps for dual, active, regulable and simultaneous dispensing of reagents. Manufacturing of immunochromatographic test strips
Feb 06, 2024Lateral flow immunoassays (LFIA) are widely used worldwide for the detection of different analytes because they combine multiple advantages such as low production cost, simplicity, and portability, which allows biomarkers detection without requiring infrastructure or highly trained personnel. Here we propose to provide solutions to the manufacturing process of LFIA at laboratory-scale, particularly to the controlled and active dispensing of the reagents in the form the Test Lines (TL) and the Control Lines (CL). To accomplish this task, we adapted a 3D printer to also control Syringe Pumps (SP), since the proposed adaptation of a 3D printer is easy, free and many laboratories already have it in their infrastructure. In turn, the standard function of the 3D printer can be easily restored by disconnecting the SPs and reconnecting the extruder. Additionally, the unified control of the 3D printer enables dual, active, regulable and simultaneous dispensing, four features that are typically found only in certain high-cost commercial equipment. With the proposed setup, the challenge of dispensing simultaneously at least 2 lines (CL and TL) with SPs controlled by a 3D printer was addressed, including regulation in the width of dispensed lines within experimental limits. Also, the construction of a LFIA for the detection of leptospirosis is shown as a practical example of automatized reagent dispensing.
Robust stability of moving horizon estimation for nonlinear systems with bounded disturbances using adaptive arrival cost
Jun 03, 2019
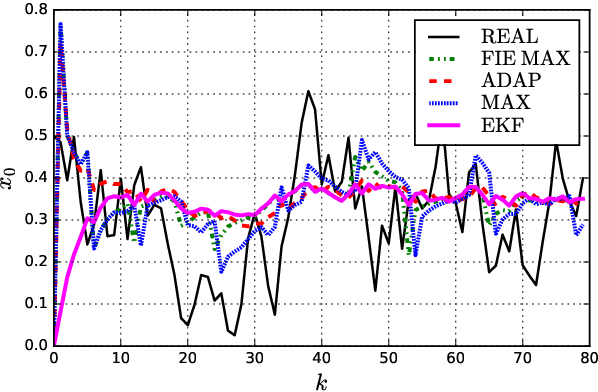
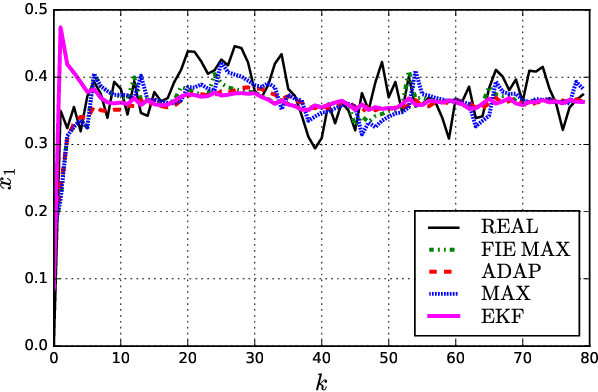

In this paper, the robust stability and convergence to the true state of moving horizon estimator based on an adaptive arrival cost are established for nonlinear detectable systems. Robust global asymptotic stability is shown for the case of non-vanishing bounded disturbances whereas the convergence to the true state is proved for the case of vanishing disturbances. Several simulations were made in order to show the estimator behaviour under different operational conditions and to compare it with the state of the art estimation methods.