 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen is gray-box modeling advantageous for virtual flow metering?
Oct 11, 2021
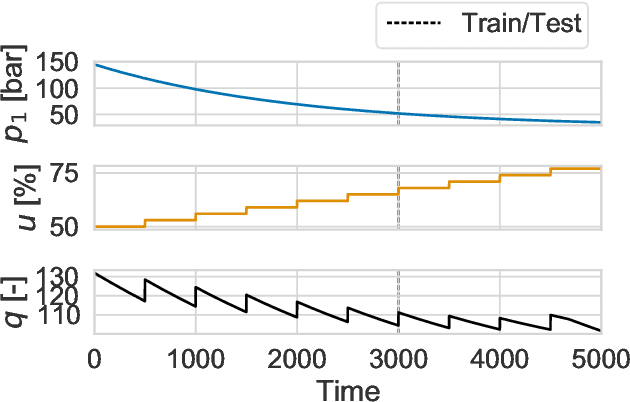
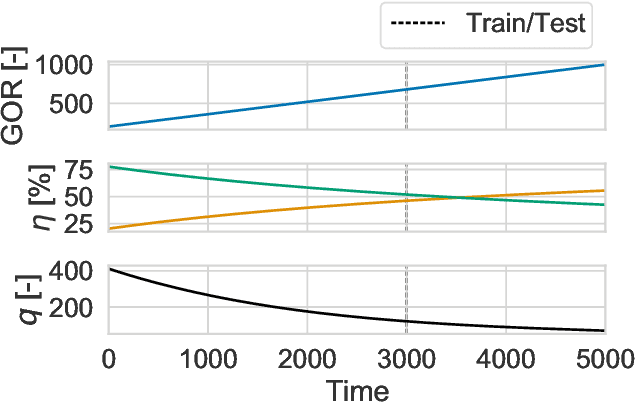
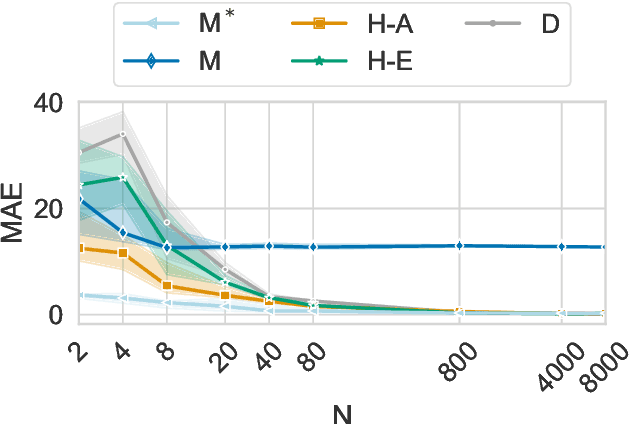
Integration of physics and machine learning in virtual flow metering applications is known as gray-box modeling. The combination is believed to enhance multiphase flow rate predictions. However, the superiority of gray-box models is yet to be demonstrated in the literature. This article examines scenarios where a gray-box model is expected to outperform physics-based and data-driven models. The experiments are conducted with synthetic data where properties of the underlying data generating process are known and controlled. The results show that a gray-box model yields increased prediction accuracy over a physics-based model in the presence of process-model mismatch. They also show improvements over a data-driven model when the amount of available data is small. On the other hand, gray-box and data-driven models are similarly influenced by noisy measurements. Lastly, the results indicate that a gray-box approach may be advantageous in nonstationary process conditions. Unfortunately, choosing the best model prior to training is challenging, and overhead on model development is unavoidable.
Hybrid Gaussian Process Modeling Applied to Economic Stochastic Model Predictive Control of Batch Processes
Aug 14, 2021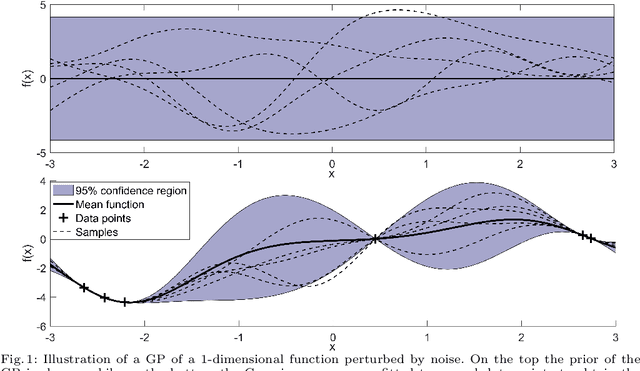
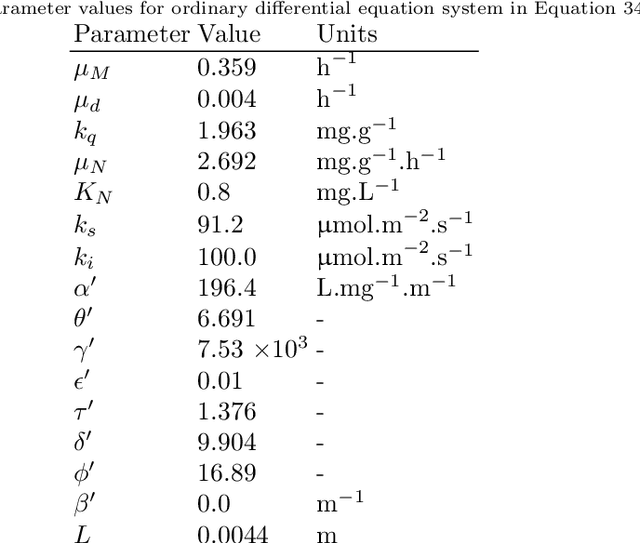
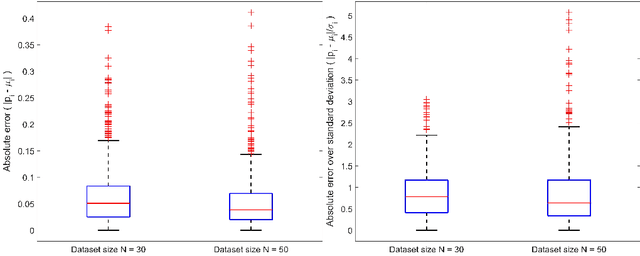

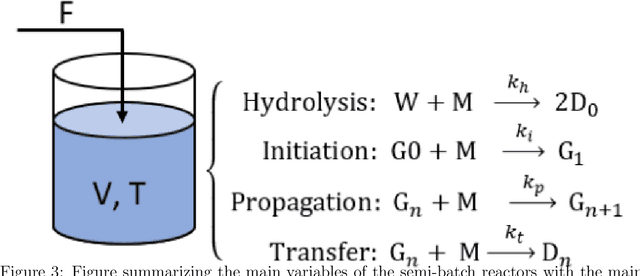
Nonlinear model predictive control (NMPC) is an efficient approach for the control of nonlinear multivariable dynamic systems with constraints, which however requires an accurate plant model. Plant models can often be determined from first principles, parts of the model are however difficult to derive using physical laws alone. In this paper a hybrid Gaussian process (GP) first principles modeling scheme is proposed to overcome this issue, which exploits GPs to model the parts of the dynamic system that are difficult to describe using first principles. GPs not only give accurate predictions, but also quantify the residual uncertainty of this model. It is vital to account for this uncertainty in the control algorithm, to prevent constraint violations and performance deterioration. Monte Carlo samples of the GPs are generated offline to tighten constraints of the NMPC to ensure joint probabilistic constraint satisfaction online. Advantages of our method include fast online evaluation times, possibility to account for online learning alleviating conservativeness, and exploiting the flexibility of GPs and the data efficiency of first principle models. The algorithm is verified on a case study involving a challenging semi-batch bioreactor.
* 24 pages, 8 figures, 2 tables
Combining Gaussian processes and polynomial chaos expansions for stochastic nonlinear model predictive control
Mar 09, 2021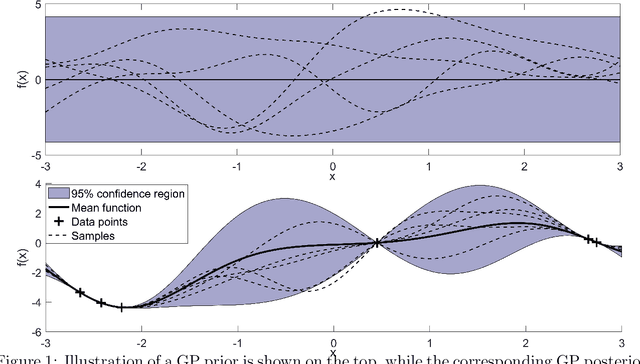
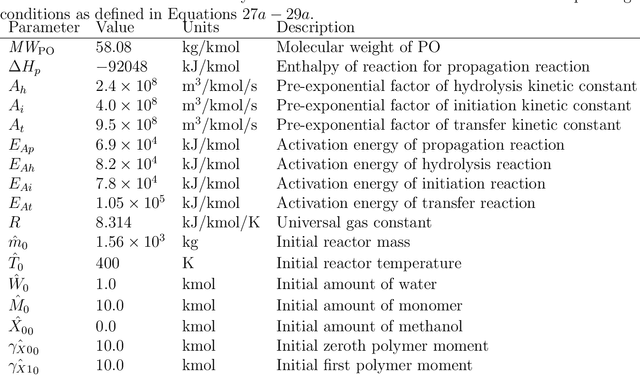
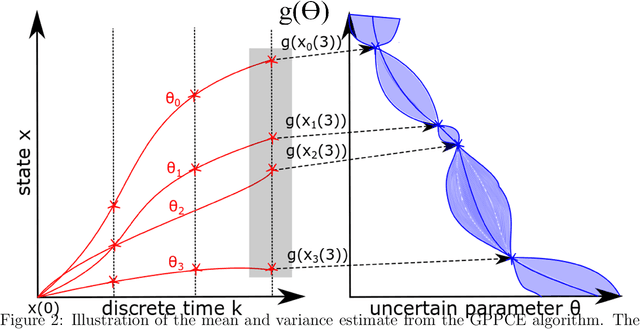
Model predictive control is an advanced control approach for multivariable systems with constraints, which is reliant on an accurate dynamic model. Most real dynamic models are however affected by uncertainties, which can lead to closed-loop performance deterioration and constraint violations. In this paper we introduce a new algorithm to explicitly consider time-invariant stochastic uncertainties in optimal control problems. The difficulty of propagating stochastic variables through nonlinear functions is dealt with by combining Gaussian processes with polynomial chaos expansions. The main novelty in this paper is to use this combination in an efficient fashion to obtain mean and variance estimates of nonlinear transformations. Using this algorithm, it is shown how to formulate both chance-constraints and a probabilistic objective for the optimal control problem. On a batch reactor case study we firstly verify the ability of the new approach to accurately approximate the probability distributions required. Secondly, a tractable stochastic nonlinear model predictive control approach is formulated with an economic objective to demonstrate the closed-loop performance of the method via Monte Carlo simulations.