 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeros2probe: Non-intrusive, Kernel-selective Observability for Robot Operating System 2 Middleware
Jun 09, 2026Robot Operating System 2 (ROS 2), the de facto standard middleware framework for robots, runs each robot as a graph of nodes communicating over the Data Distribution Service (DDS), a publish/subscribe substrate. Observing this inter-node communication in real time is essential to robot development, yet it has a price. A tool can receive data only by joining the DDS domain as a subscriber that discovery has matched to the publisher, so observing folds the tool into the system it measures and perturbs it. We define this protocol-inherent perturbation as the observer's probe effect. It inflates the discovery plane, adds deserialization cost on the observer, makes the loss it reports diverge from what the subscriber actually received, and near saturation displaces the subscriber's messages. The only escape, capturing all wire traffic passively, discards ROS 2 message semantics and scales with total traffic, not what is observed. We present ros2probe, a non-intrusive observation framework that removes the probe effect. It reconstructs the full ROS 2 communication state from the domain's discovery packets at no bandwidth cost, then drives an in-kernel filter restricted to the topics the user asks for, lifting only those packets at minimal cost and observing what the real subscriber receives. Its interfaces and recordings match the standard ROS 2 tools. Across three hardware platforms (laptop, Jetson, and Raspberry Pi), two DDS implementations, and seven robot-operation workloads, ros2probe holds the discovery graph within 0.5% of an unobserved system, whereas domain-joining tools inflate discovery up to 2.6$\times$ and drop 38.5% of the subscriber's messages at saturation while ros2probe drops none. It reports loss with a recall of 1.0, cuts observer CPU and memory by up to 7$\times$ and 28$\times$, and stays practical on the embedded robots where existing tools overload the system.
Harness Engineering for Physical AI: Robot Middleware Is the Harness Layer
Jun 08, 2026Robot middleware faces a new role in the era of Physical AI. Learned policies, planners, and vision-language-action (VLA) models now enter deployed robots as causal participants on the control path, but the layer that integrates them with timing, scheduling, and network has not been named. Recent language-agent work names this layer the harness, the external system that mediates tools, manages state, bounds resources, and records execution. The robotics community has not yet adopted this framing, and we propose that robot middleware is that harness. A Physical AI harness differs from a software harness in where it intervenes. A software harness mediates at tool-call boundaries. A Physical AI harness must mediate at control, computing, and communication simultaneously, because a learned policy's output crosses all three: its commands shift the trajectory, its inference time shifts the schedule, and its payload shifts the bandwidth. Robot middleware is the lowest robot-stack layer with mediating abstractions over all three, so it is best positioned to compose their enforcement. It already provides most of what a harness needs but lacks the enforcement for an AI model. We name this missing enforcement as three functions: Projection gates each output at emission, Isolation bounds the model's execution and transmission slot, and Transfer falls back to a verified baseline when checks fail. Each appears today as hand-built application code in deployed robot systems, built on surfaces robot middleware already provides. Robot middleware should host them not as the best single-axis enforcer but as the layer that composes all three. We sketch this as a ROS 2 Harness Profile, a deployment artifact that carries an AI model's declared output region, inference budget, and operating regime while the middleware enforces them across ROS 2, DDS, and Zenoh.
Dependency Chain Analysis of ROS 2 DDS QoS Policies: From Lifecycle Tutorial to Static Verification
Sep 03, 2025Robot Operating System 2 (ROS 2) relies on the Data Distribution Service (DDS), which offers more than 20 Quality of Service (QoS) policies governing availability, reliability, and resource usage. Yet ROS 2 users lack clear guidance on safe policy combinations and validation processes prior to deployment, which often leads to trial-and-error tuning and unexpected runtime failures. To address these challenges, we analyze DDS Publisher-Subscriber communication over a life cycle divided into Discovery, Data Exchange, and Disassociation, and provide a user oriented tutorial explaining how 16 QoS policies operate in each phase. Building on this analysis, we derive a QoS dependency chain that formalizes inter-policy relationships and classifies 41 dependency violation rules, capturing constraints that commonly cause communication failures in practice. Finally, we introduce QoS Guard, a ROS 2 package that statically validates DDS XML profiles offline, flags conflicts, and enables safe, predeployment tuning without establishing a live ROS 2 session. Together, these contributions give ROS 2 users both conceptual insight and a concrete tool that enables early detection of misconfigurations, improving the reliability and resource efficiency of ROS 2 based robotic systems.
Probabilistic Latency Analysis of the Data Distribution Service in ROS 2
Aug 14, 2025Robot Operating System 2 (ROS 2) is now the de facto standard for robotic communication, pairing UDP transport with the Data Distribution Service (DDS) publish-subscribe middleware. DDS achieves reliability through periodic heartbeats that solicit acknowledgments for missing samples and trigger selective retransmissions. In lossy wireless networks, the tight coupling among heartbeat period, IP fragmentation, and retransmission interval obscures end to end latency behavior and leaves practitioners with little guidance on how to tune these parameters. To address these challenges, we propose a probabilistic latency analysis (PLA) that analytically models the reliable transmission process of ROS 2 DDS communication using a discrete state approach. By systematically analyzing both middleware level and transport level events, PLA computes the steady state probability distribution of unacknowledged messages and the retransmission latency. We validate our PLA across 270 scenarios, exploring variations in packet delivery ratios, message sizes, and both publishing and retransmission intervals, demonstrating a close alignment between analytical predictions and experimental results. Our findings establish a theoretical basis to systematically optimize reliability, latency, and performance in wireless industrial robotics.
Learning-enabled Flexible Job-shop Scheduling for Scalable Smart Manufacturing
Feb 14, 2024



In smart manufacturing systems (SMSs), flexible job-shop scheduling with transportation constraints (FJSPT) is essential to optimize solutions for maximizing productivity, considering production flexibility based on automated guided vehicles (AGVs). Recent developments in deep reinforcement learning (DRL)-based methods for FJSPT have encountered a scale generalization challenge. These methods underperform when applied to environment at scales different from their training set, resulting in low-quality solutions. To address this, we introduce a novel graph-based DRL method, named the Heterogeneous Graph Scheduler (HGS). Our method leverages locally extracted relational knowledge among operations, machines, and vehicle nodes for scheduling, with a graph-structured decision-making framework that reduces encoding complexity and enhances scale generalization. Our performance evaluation, conducted with benchmark datasets, reveals that the proposed method outperforms traditional dispatching rules, meta-heuristics, and existing DRL-based approaches in terms of makespan performance, even on large-scale instances that have not been experienced during training.
DeepWiTraffic: Low Cost WiFi-Based Traffic Monitoring System Using Deep Learning
Dec 19, 2018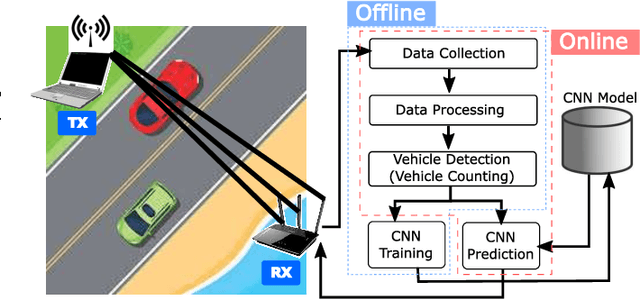
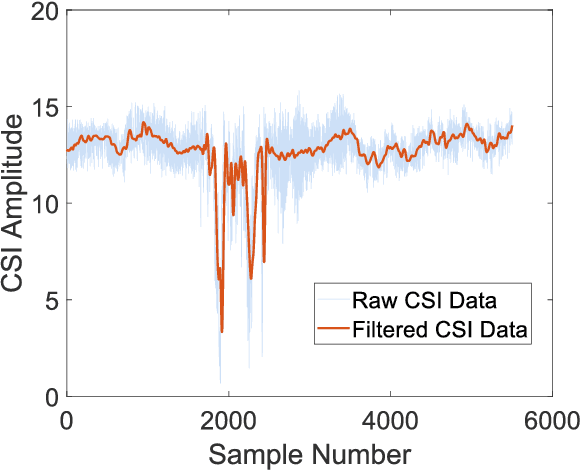
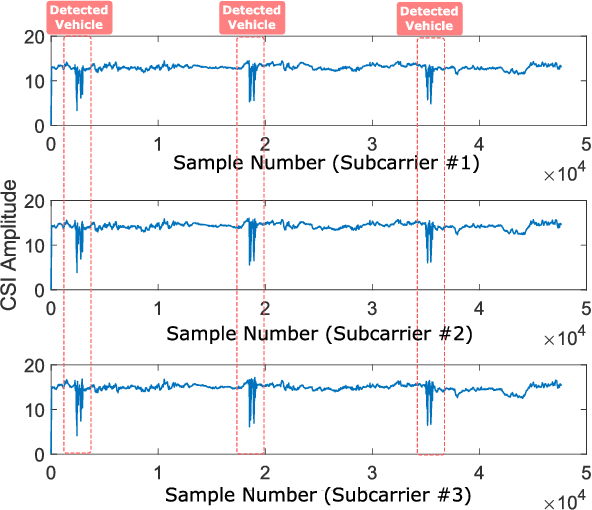
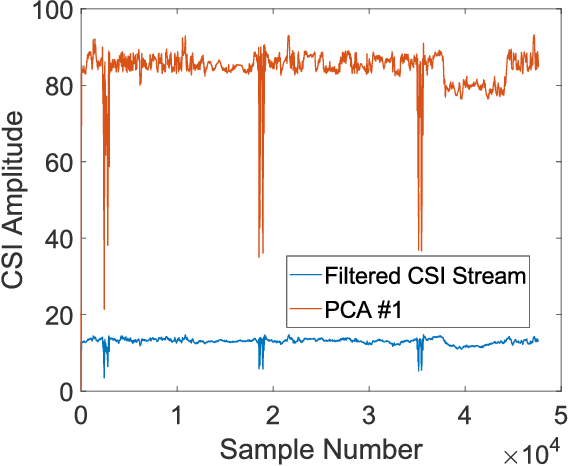
A traffic monitoring system (TMS) is an integral part of Intelligent Transportation Systems (ITS) for traffic analysis and planning. This paper addresses the endemic cost issue of deploying a large number of TMSs to cover huge miles of two-lane rural highways (119,247 miles in U.S.). A low-cost and portable TMS called DeepWiTraffic based on COTs WiFi devices and deep learning is proposed. DeepWiTraffic enables accurate vehicle detection and classification by exploiting the unique WiFi Channel State Information (CSI) of passing vehicles. Spatial and temporal correlations of preprocessed CSI amplitude and phase data are identified and analyzed using deep learning to classify vehicles into five different types: motorcycle, passenger vehicle, SUV, pickup truck, and large truck. A large amount of CSI data of passing vehicles and the corresponding ground truth video data are collected for about 120 hours to validate the effectiveness of DeepWiTraffic. The results show that the average detection accuracy of 99.4%, and the average classification accuracy of 91.1% (Motorcycle: 97.2%, Passenger Car: 91.1%, SUV:83.8%, Pickup Truck: 83.3%, and Large Truck: 99.7%) are achieved at a very small cost of about $1,000.