 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReLink: Computational Circular Design of Planar Linkage Mechanisms Using Available Standard Parts
Jun 24, 2025The Circular Economy framework emphasizes sustainability by reducing resource consumption and waste through the reuse of components and materials. This paper presents ReLink, a computational framework for the circular design of planar linkage mechanisms using available standard parts. Unlike most mechanism design methods, which assume the ability to create custom parts and infinite part availability, ReLink prioritizes the reuse of discrete, standardized components, thus minimizing the need for new parts. The framework consists of two main components: design generation, where a generative design algorithm generates mechanisms from an inventory of available parts, and inverse design, which uses optimization methods to identify designs that match a user-defined trajectory curve. The paper also examines the trade-offs between kinematic performance and CO2 footprint when incorporating new parts. Challenges such as the combinatorial nature of the design problem and the enforcement of valid solutions are addressed. By combining sustainability principles with kinematic synthesis, ReLink lays the groundwork for further research into computational circular design to support the development of systems that integrate reused components into mechanical products.
Harnessing bistability for directional propulsion of untethered, soft robots
Oct 12, 2017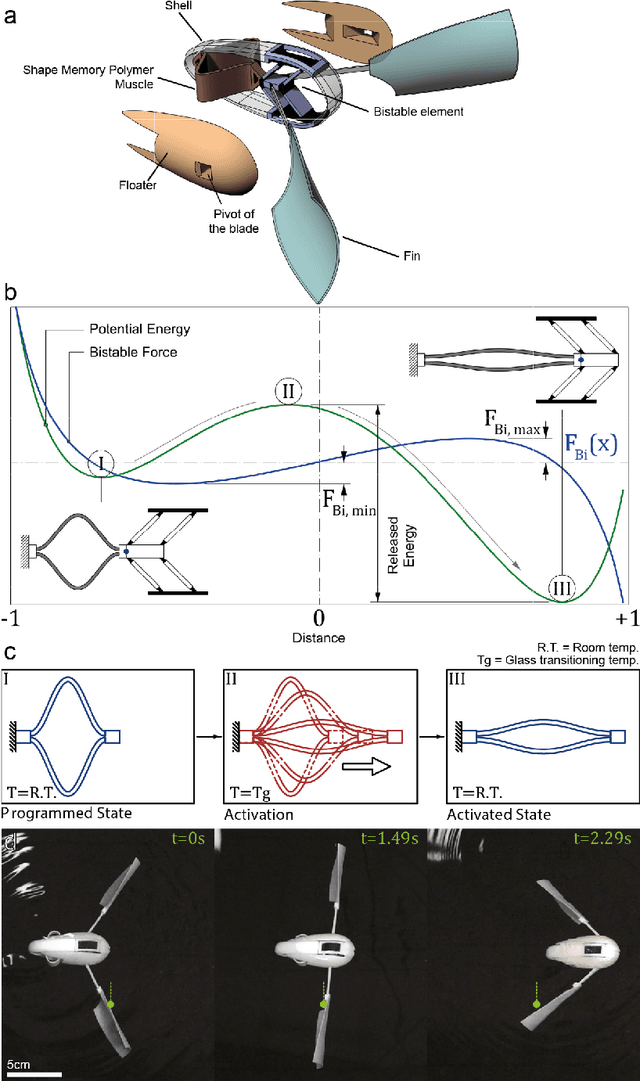
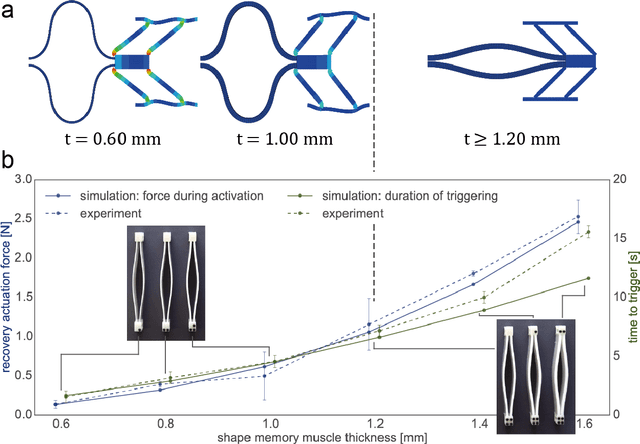
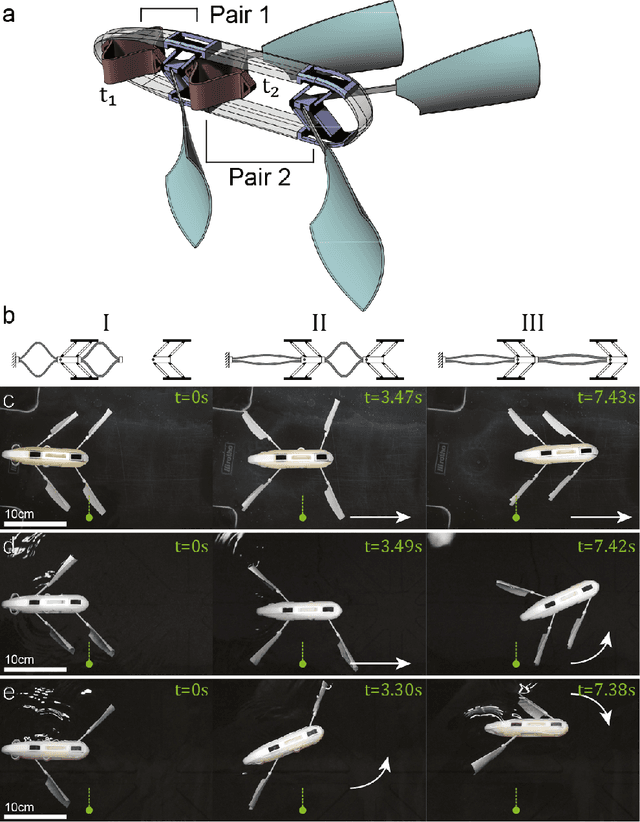
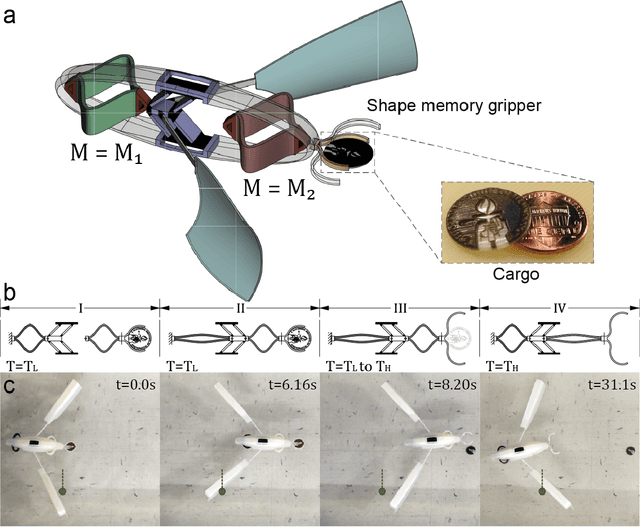
In most macro-scale robotics systems , propulsion and controls are enabled through a physical tether or complex on-board electronics and batteries. A tether simplifies the design process but limits the range of motion of the robot, while on-board controls and power supplies are heavy and complicate the design process. Here we present a simple design principle for an untethered, entirely soft, swimming robot with the ability to achieve preprogrammed, directional propulsion without a battery or on-board electronics. Locomotion is achieved by employing actuators that harness the large displacements of bistable elements, triggered by surrounding temperature changes. Powered by shape memory polymer (SMP) muscles, the bistable elements in turn actuates the robot's fins. Our robots are fabricated entirely using a commercially available 3D printer with no post-processing. As a proof-of-concept, we demonstrate the ability to program a vessel, which can autonomously deliver a cargo and navigate back to the deployment point.
A comparison of semi-deterministic and stochastic search techniques
May 18, 2016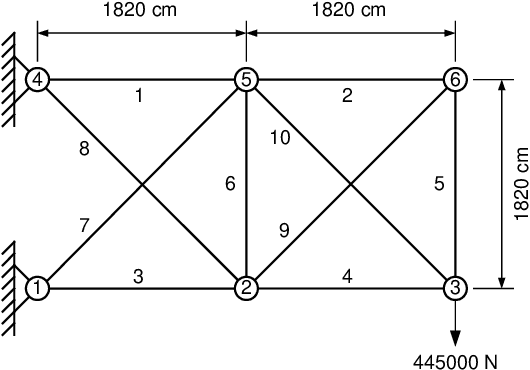
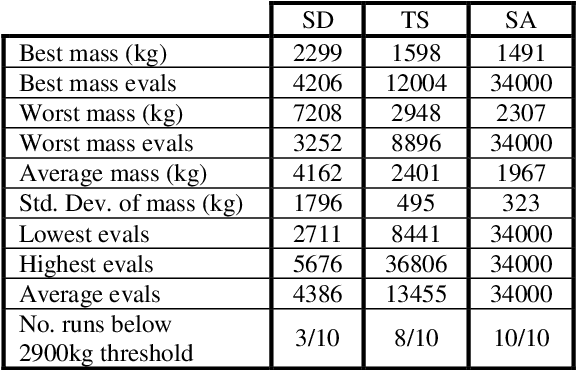
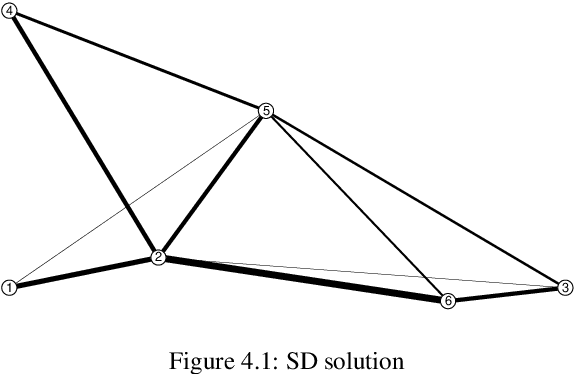
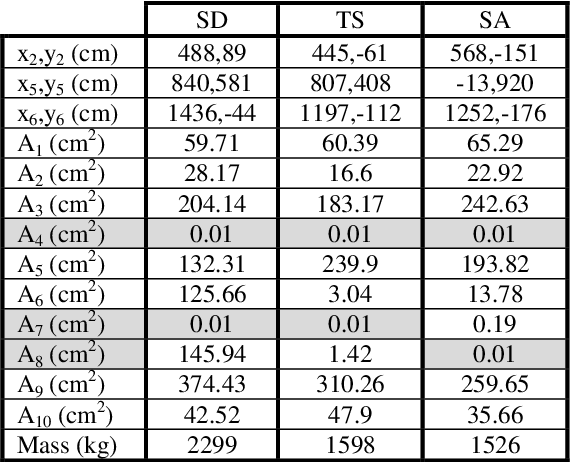
This paper presents an investigation of two search techniques, tabu search (TS) and simulated annealing (SA), to assess their relative merits when applied to engineering design optimisation. Design optimisation problems are generally characterised as having multi-modal search spaces and discontinuities making global optimisation techniques beneficial. Both techniques claim to be capable of locating globally optimum solutions on a range of problems but this capability is derived from different underlying philosophies. While tabu search uses a semi-deterministic approach to escape local optima, simulated annealing uses a complete stochastic approach. The performance of each technique is investigated using a structural optimisation problem. These performances are then compared to each other as and to a steepest descent (SD) method.