 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSample complexity of learning Mahalanobis distance metrics
May 11, 2015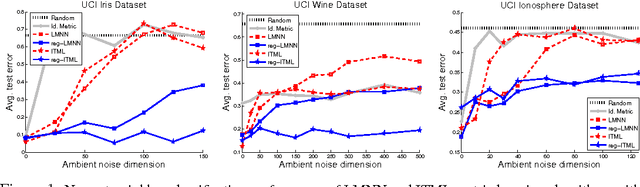
Metric learning seeks a transformation of the feature space that enhances prediction quality for the given task at hand. In this work we provide PAC-style sample complexity rates for supervised metric learning. We give matching lower- and upper-bounds showing that the sample complexity scales with the representation dimension when no assumptions are made about the underlying data distribution. However, by leveraging the structure of the data distribution, we show that one can achieve rates that are fine-tuned to a specific notion of intrinsic complexity for a given dataset. Our analysis reveals that augmenting the metric learning optimization criterion with a simple norm-based regularization can help adapt to a dataset's intrinsic complexity, yielding better generalization. Experiments on benchmark datasets validate our analysis and show that regularizing the metric can help discern the signal even when the data contains high amounts of noise.
Multi-camera Realtime 3D Tracking of Multiple Flying Animals
Jan 25, 2010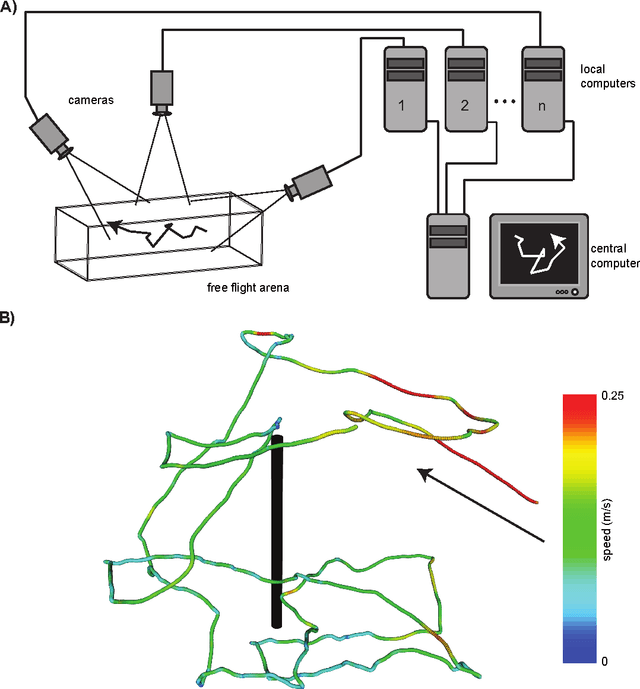
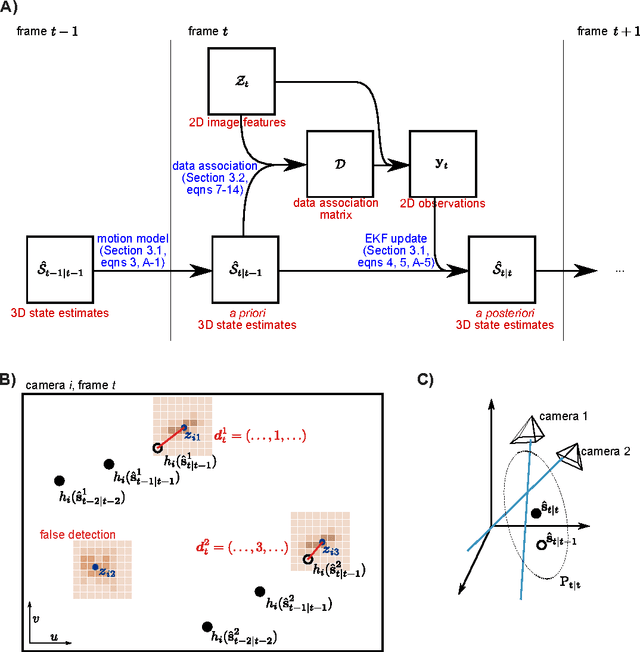
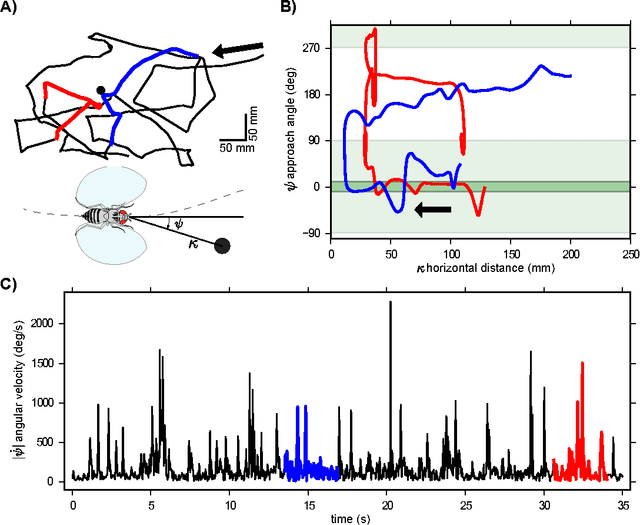
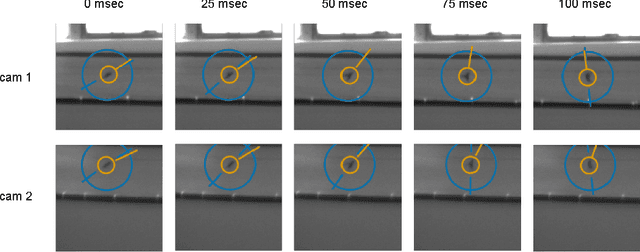
Automated tracking of animal movement allows analyses that would not otherwise be possible by providing great quantities of data. The additional capability of tracking in realtime - with minimal latency - opens up the experimental possibility of manipulating sensory feedback, thus allowing detailed explorations of the neural basis for control of behavior. Here we describe a new system capable of tracking the position and body orientation of animals such as flies and birds. The system operates with less than 40 msec latency and can track multiple animals simultaneously. To achieve these results, a multi target tracking algorithm was developed based on the Extended Kalman Filter and the Nearest Neighbor Standard Filter data association algorithm. In one implementation, an eleven camera system is capable of tracking three flies simultaneously at 60 frames per second using a gigabit network of nine standard Intel Pentium 4 and Core 2 Duo computers. This manuscript presents the rationale and details of the algorithms employed and shows three implementations of the system. An experiment was performed using the tracking system to measure the effect of visual contrast on the flight speed of Drosophila melanogaster. At low contrasts, speed is more variable and faster on average than at high contrasts. Thus, the system is already a useful tool to study the neurobiology and behavior of freely flying animals. If combined with other techniques, such as `virtual reality'-type computer graphics or genetic manipulation, the tracking system would offer a powerful new way to investigate the biology of flying animals.