 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContext-Aware Sensor Modeling for Asynchronous Multi-Sensor Tracking in Stone Soup
Mar 16, 2026Multi-sensor tracking in the real world involves asynchronous sensors with partial coverage and heterogeneous detection performance. Although probabilistic tracking methods permit detection probability and clutter intensity to depend on state and sensing context, many practical frameworks enforce globally uniform observability assumptions. Under multi-rate and partially overlapping sensing, this simplification causes repeated non-detections from high-rate sensors to erode tracks visible only to low-rate sensors, potentially degrading fusion performance. We introduce DetectorContext, an abstraction for the open-source multi-target tracking framework Stone Soup. DetectorContext exposes detection probability and clutter intensity as state-dependent functions evaluated during hypothesis formation. The abstraction integrates with existing probabilistic trackers without modifying their update equations. Experiments on asynchronous radar-lidar data demonstrate that context-aware modeling restores stable fusion and significantly improves HOTA and GOSPA performance without increasing false tracks.
BASE: Probably a Better Approach to Multi-Object Tracking
Sep 21, 2023The field of visual object tracking is dominated by methods that combine simple tracking algorithms and ad hoc schemes. Probabilistic tracking algorithms, which are leading in other fields, are surprisingly absent from the leaderboards. We found that accounting for distance in target kinematics, exploiting detector confidence and modelling non-uniform clutter characteristics is critical for a probabilistic tracker to work in visual tracking. Previous probabilistic methods fail to address most or all these aspects, which we believe is why they fall so far behind current state-of-the-art (SOTA) methods (there are no probabilistic trackers in the MOT17 top 100). To rekindle progress among probabilistic approaches, we propose a set of pragmatic models addressing these challenges, and demonstrate how they can be incorporated into a probabilistic framework. We present BASE (Bayesian Approximation Single-hypothesis Estimator), a simple, performant and easily extendible visual tracker, achieving state-of-the-art (SOTA) on MOT17 and MOT20, without using Re-Id. Code will be made available at https://github.com/ffi-no
Reinforcement Learning-based Switching Controller for a Milliscale Robot in a Constrained Environment
Nov 27, 2021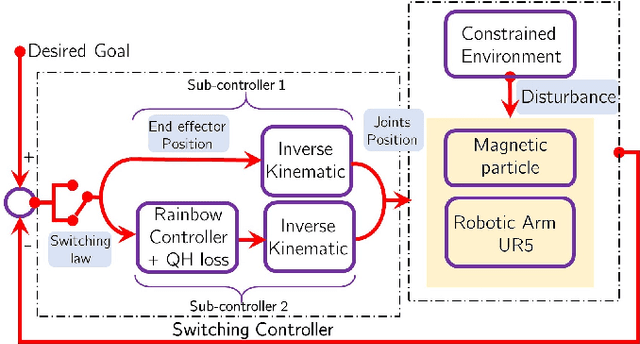
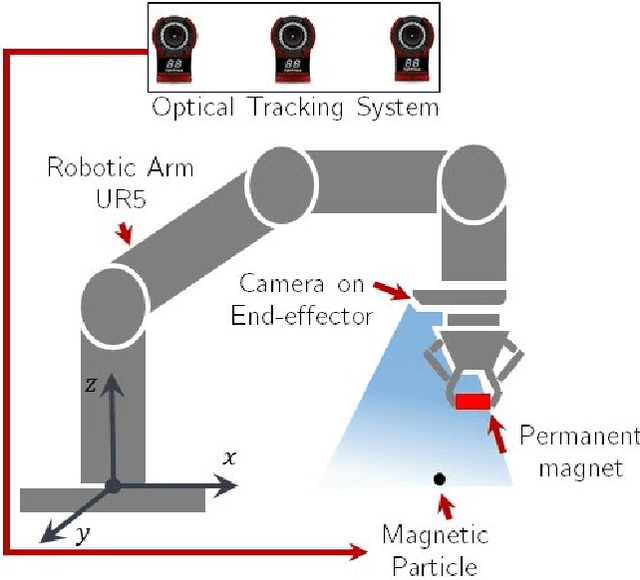
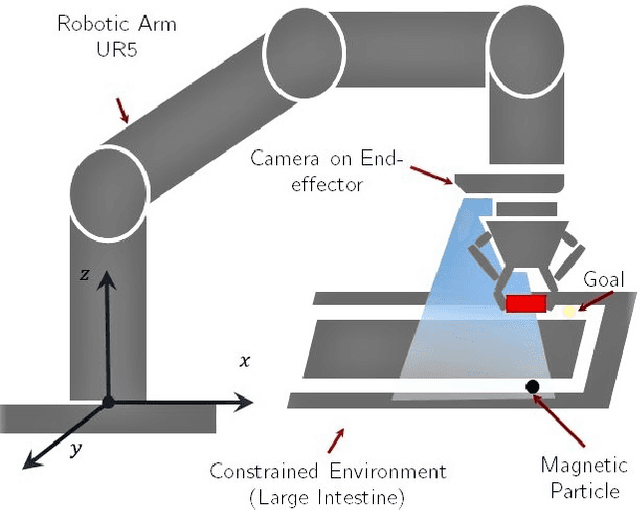
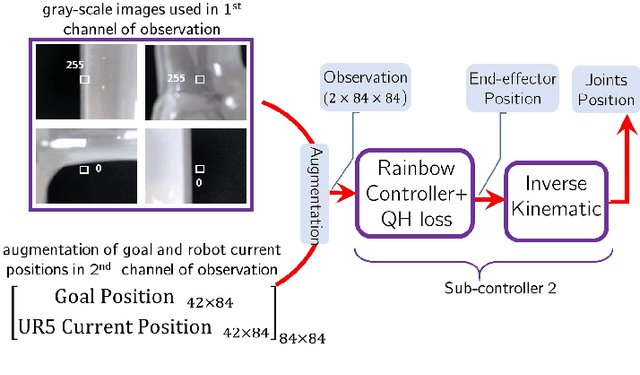
This work presents a reinforcement learning-based switching control mechanism to autonomously move a ferromagnetic object (representing a milliscale robot) around obstacles within a constrained environment in the presence of disturbances. This mechanism can be used to navigate objects (e.g., capsule endoscopy, swarms of drug particles) through complex environments when active control is a necessity but where direct manipulation can be hazardous. The proposed control scheme consists of a switching control architecture implemented by two sub-controllers. The first sub-controller is designed to employs the robot's inverse kinematic solutions to do an environment search of the to-be-carried ferromagnetic particle while being robust to disturbances. The second sub-controller uses a customized rainbow algorithm to control a robotic arm, i.e., the UR5 robot, to carry a ferromagnetic particle to a desired position through a constrained environment. For the customized Rainbow algorithm, Quantile Huber loss from the Implicit Quantile Networks (IQN) algorithm and ResNet are employed. The proposed controller is first trained and tested in a real-time physics simulation engine (PyBullet). Afterward, the trained controller is transferred to a UR5 robot to remotely transport a ferromagnetic particle in a real-world scenario to demonstrate the applicability of the proposed approach. The experimental results show an average success rate of 98.86\% calculated over 30 episodes for randomly generated trajectories.