 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Ship Responses in Different Seaways using a Generalizable Force Correcting Machine Learning Method
May 13, 2024A machine learning (ML) method is generalizable if it can make predictions on inputs which differ from the training dataset. For predictions of wave-induced ship responses, generalizability is an important consideration if ML methods are to be useful in design evaluations. Furthermore, the size of the training dataset has a significant impact on the practicality of a method, especially when training data is generated using high-fidelity numerical tools which are expensive. This paper considers a hybrid machine learning method which corrects the force in a low-fidelity equation of motion. The method is applied to two different case studies: the nonlinear responses of a Duffing equation subject to irregular excitation, and high-fidelity heave and pitch response data of a Fast Displacement Ship (FDS) in head seas. The generalizability of the method is determined in both cases by making predictions of the response in irregular wave conditions that differ from those in the training dataset. The influence that low-fidelity physics-based terms in the hybrid model have on generalizability is also investigated. The predictions are compared to two benchmarks: a linear physics-based model and a data-driven LSTM model. It is found that the hybrid method offers an improvement in prediction accuracy and generalizability when trained on a small dataset.
Implementation of the Critical Wave Groups Method with Computational Fluid Dynamics and Neural Networks
Jan 24, 2023Accurate and efficient prediction of extreme ship responses continues to be a challenging problem in ship hydrodynamics. Probabilistic frameworks in conjunction with computationally efficient numerical hydrodynamic tools have been developed that allow researchers and designers to better understand extremes. However, the ability of these hydrodynamic tools to represent the physics quantitatively during extreme events is limited. Previous research successfully implemented the critical wave groups (CWG) probabilistic method with computational fluid dynamics (CFD). Although the CWG method allows for less simulation time than a Monte Carlo approach, the large quantity of simulations required is cost prohibitive. The objective of the present paper is to reduce the computational cost of implementing CWG with CFD, through the construction of long short-term memory (LSTM) neural networks. After training the models with a limited quantity of simulations, the models can provide a larger quantity of predictions to calculate the probability. The new framework is demonstrated with a 2-D midship section of the Office of Naval Research Tumblehome (ONRT) hull in Sea State 7 and beam seas at zero speed. The new framework is able to produce predictions that are representative of a purely CFD-driven CWG framework, with two orders of magnitude of computational cost savings.
Data-Driven System Identification of 6-DoF Ship Motion in Waves with Neural Networks
Nov 02, 2021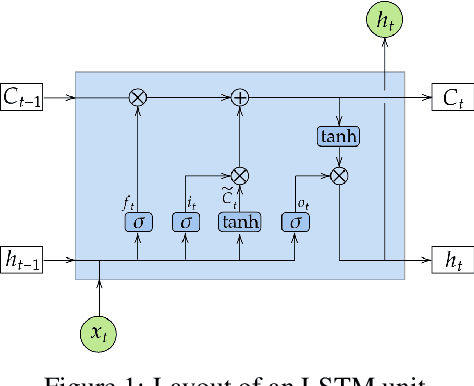
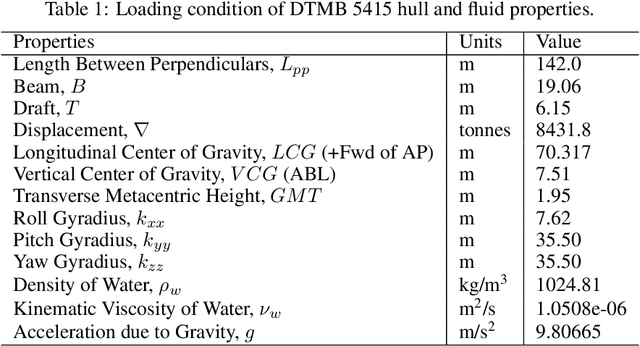
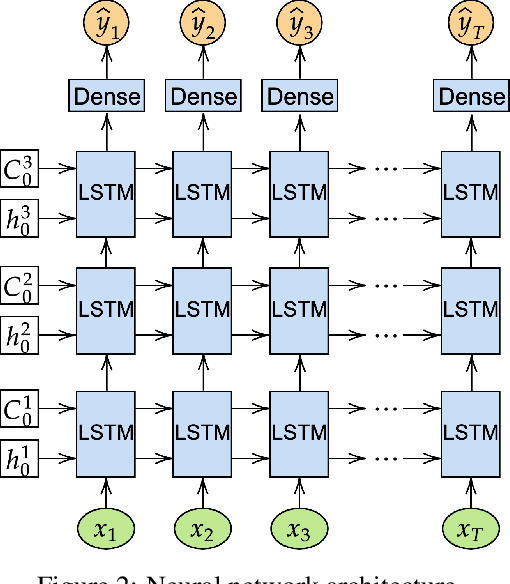
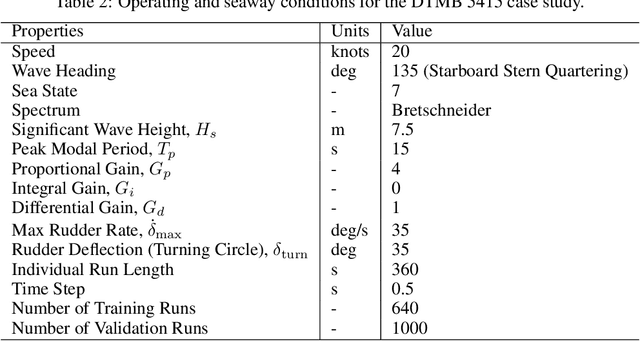
Critical evaluation and understanding of ship responses in the ocean is important for not only the design and engineering of future platforms but also the operation and safety of those that are currently deployed. Simulations or experiments are typically performed in nominal sea conditions during ship design or prior to deployment and the results may not be reflective of the instantaneous state of the vessel and the ocean environment while deployed. Short-term temporal predictions of ship responses given the current wave environment and ship state would enable enhanced decision-making onboard for both manned and unmanned vessels. However, the current state-of-the-art in numerical hydrodynamic simulation tools are too computationally expensive to be employed for real-time ship motion forecasting and the computationally efficient tools are too low fidelity to provide accurate responses. A methodology is developed with long short-term memory (LSTM) neural networks to represent the motions of a free running David Taylor Model Basin (DTMB) 5415 destroyer operating at 20 knots in Sea State 7 stern-quartering irregular seas. Case studies are performed for both course-keeping and turning circle scenarios. An estimate of the vessel's encounter frame is made with the trajectories observed in the training dataset. Wave elevation time histories are given by artificial wave probes that travel with the estimated encounter frame and serve as input into the neural network, while the output is the 6-DOF temporal ship motion response. Overall, the neural network is able to predict the temporal response of the ship due to unseen waves accurately, which makes this methodology suitable for system identification and real-time ship motion forecasting. The methodology, the dependence of model accuracy on wave probe and training data quantity and the estimated encounter frame are all detailed.