 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficientPENet: Real-Time Depth Completion from Sparse LiDAR via Lightweight Multi-Modal Fusion
Apr 20, 2026Depth completion from sparse LiDAR measurements and corresponding RGB images is a prerequisite for accurate 3D perception in robotic systems. Existing methods achieve high accuracy on standard benchmarks but rely on heavy backbone architectures that preclude real-time deployment on embedded hardware. We present EfficientPENet, a two-branch depth completion network that replaces the conventional ResNet encoder with a modernized ConvNeXt backbone, introduces sparsity-invariant convolutions for the depth stream, and refines predictions through a Convolutional Spatial Propagation Network (CSPN). The RGB branch leverages ImageNet-pretrained ConvNeXt blocks with Layer Normalization, 7x7 depthwise convolutions, and stochastic depth regularization. Features from both branches are merged via late fusion and decoded through a multi-scale deep supervision strategy. We further introduce a position-aware test-time augmentation scheme that corrects coordinate tensors during horizontal flipping, yielding consistent error reduction at inference. On the KITTI depth completion benchmark, EfficientPENet achieves an RMSE of 631.94 mm with 36.24M parameters and a latency of 20.51 ms, operating at 48.76 FPS. This represents a 3.7 times reduction in parameters and a 23 times speedup relative to BP-Net, while maintaining competitive accuracy. These results establish EfficientPENet as a practical solution for real-time depth completion on resource-constrained edge platforms such as the NVIDIA Jetson.
VeloxNet: Efficient Spatial Gating for Lightweight Embedded Image Classification
Mar 19, 2026Deploying deep learning models on embedded devices for tasks such as aerial disaster monitoring and infrastructure inspection requires architectures that balance accuracy with strict constraints on model size, memory, and latency. This paper introduces VeloxNet, a lightweight CNN architecture that replaces SqueezeNet's fire modules with gated multi-layer perceptron (gMLP) blocks for embedded image classification. Each gMLP block uses a spatial gating unit (SGU) that applies learned spatial projections and multiplicative gating, enabling the network to capture spatial dependencies across the full feature map in a single layer. Unlike fire modules, which are limited to local receptive fields defined by small convolutional kernels, the SGU provides global spatial modeling at each layer with fewer parameters. We evaluate VeloxNet on three aerial image datasets: the Aerial Image Database for Emergency Response (AIDER), the Comprehensive Disaster Dataset (CDD), and the Levee Defect Dataset (LDD), comparing against eleven baselines including MobileNet variants, ShuffleNet, EfficientNet, and recent vision transformers. VeloxNet reduces the parameter count by 46.1% relative to SqueezeNet (from 740,970 to 399,366) while improving weighted F1 scores by 6.32% on AIDER, 30.83% on CDD, and 2.51% on LDD. These results demonstrate that substituting local convolutional modules with spatial gating blocks can improve both classification accuracy and parameter efficiency for resource-constrained deployment. The source code will be made publicly available upon acceptance of the paper.
KARMA: Efficient Structural Defect Segmentation via Kolmogorov-Arnold Representation Learning
Aug 11, 2025
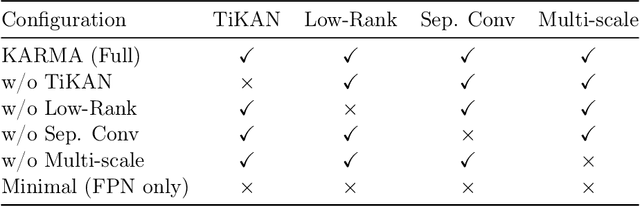


Semantic segmentation of structural defects in civil infrastructure remains challenging due to variable defect appearances, harsh imaging conditions, and significant class imbalance. Current deep learning methods, despite their effectiveness, typically require millions of parameters, rendering them impractical for real-time inspection systems. We introduce KARMA (Kolmogorov-Arnold Representation Mapping Architecture), a highly efficient semantic segmentation framework that models complex defect patterns through compositions of one-dimensional functions rather than conventional convolutions. KARMA features three technical innovations: (1) a parameter-efficient Tiny Kolmogorov-Arnold Network (TiKAN) module leveraging low-rank factorization for KAN-based feature transformation; (2) an optimized feature pyramid structure with separable convolutions for multi-scale defect analysis; and (3) a static-dynamic prototype mechanism that enhances feature representation for imbalanced classes. Extensive experiments on benchmark infrastructure inspection datasets demonstrate that KARMA achieves competitive or superior mean IoU performance compared to state-of-the-art approaches, while using significantly fewer parameters (0.959M vs. 31.04M, a 97% reduction). Operating at 0.264 GFLOPS, KARMA maintains inference speeds suitable for real-time deployment, enabling practical automated infrastructure inspection systems without compromising accuracy. The source code can be accessed at the following URL: https://github.com/faeyelab/karma.
Few-Shot Learning in Video and 3D Object Detection: A Survey
Jul 22, 2025Few-shot learning (FSL) enables object detection models to recognize novel classes given only a few annotated examples, thereby reducing expensive manual data labeling. This survey examines recent FSL advances for video and 3D object detection. For video, FSL is especially valuable since annotating objects across frames is more laborious than for static images. By propagating information across frames, techniques like tube proposals and temporal matching networks can detect new classes from a couple examples, efficiently leveraging spatiotemporal structure. FSL for 3D detection from LiDAR or depth data faces challenges like sparsity and lack of texture. Solutions integrate FSL with specialized point cloud networks and losses tailored for class imbalance. Few-shot 3D detection enables practical autonomous driving deployment by minimizing costly 3D annotation needs. Core issues in both domains include balancing generalization and overfitting, integrating prototype matching, and handling data modality properties. In summary, FSL shows promise for reducing annotation requirements and enabling real-world video, 3D, and other applications by efficiently leveraging information across feature, temporal, and data modalities. By comprehensively surveying recent advancements, this paper illuminates FSL's potential to minimize supervision needs and enable deployment across video, 3D, and other real-world applications.
KANICE: Kolmogorov-Arnold Networks with Interactive Convolutional Elements
Oct 22, 2024



We introduce KANICE (Kolmogorov-Arnold Networks with Interactive Convolutional Elements), a novel neural architecture that combines Convolutional Neural Networks (CNNs) with Kolmogorov-Arnold Network (KAN) principles. KANICE integrates Interactive Convolutional Blocks (ICBs) and KAN linear layers into a CNN framework. This leverages KANs' universal approximation capabilities and ICBs' adaptive feature learning. KANICE captures complex, non-linear data relationships while enabling dynamic, context-dependent feature extraction based on the Kolmogorov-Arnold representation theorem. We evaluated KANICE on four datasets: MNIST, Fashion-MNIST, EMNIST, and SVHN, comparing it against standard CNNs, CNN-KAN hybrids, and ICB variants. KANICE consistently outperformed baseline models, achieving 99.35% accuracy on MNIST and 90.05% on the SVHN dataset. Furthermore, we introduce KANICE-mini, a compact variant designed for efficiency. A comprehensive ablation study demonstrates that KANICE-mini achieves comparable performance to KANICE with significantly fewer parameters. KANICE-mini reached 90.00% accuracy on SVHN with 2,337,828 parameters, compared to KANICE's 25,432,000. This study highlights the potential of KAN-based architectures in balancing performance and computational efficiency in image classification tasks. Our work contributes to research in adaptive neural networks, integrates mathematical theorems into deep learning architectures, and explores the trade-offs between model complexity and performance, advancing computer vision and pattern recognition. The source code for this paper is publicly accessible through our GitHub repository (https://github.com/m-ferdaus/kanice).