 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBus Ridership Prediction with Time Section, Weather, and Ridership Trend Aware Multiple LSTM
Apr 13, 2023Public transportation has been essential in people's lives in recent years. Bus ridership is a factor in people's choice to board the bus. Therefore, from the perspective of improving service quality, it is important to inform passengers who have not boarded the bus yet about future bus ridership. However, there is a concern that providing inaccurate information may cause a negative experience. Against this backdrop, there is a need to provide bus passengers who have not boarded yet with highly accurate predictions. Many researchers are working on studies on this. However, two issues summarize related studies. The first is that the correlation of bus ridership between consecutive bus stops should be considered for the prediction. The second is that the prediction has yet to be made using all of the features shown to be useful in each related study. This study proposes a prediction method that addresses both of these issues. We solve the first issue by designing an LSTM-based architecture for each bus stop and a single model for the entire bus stop. We solve the second issue by inputting all useful data, the past bus ridership, day of the week, time section, weather, and precipitation, as features. Bus ridership at each bus stop collected from buses operated by Minato Kanko Bus Inc, in Kobe city, Hyogo, Japan, from October 1, 2021, to September 30, 2022, were used to compare accuracy. The proposed method improved RMSE by 23% on average and up to 27% compared to existing methods.
Feasibility Study of Magnetism-based Indoor Positioning Methods in an Incineration Plant
Mar 24, 2022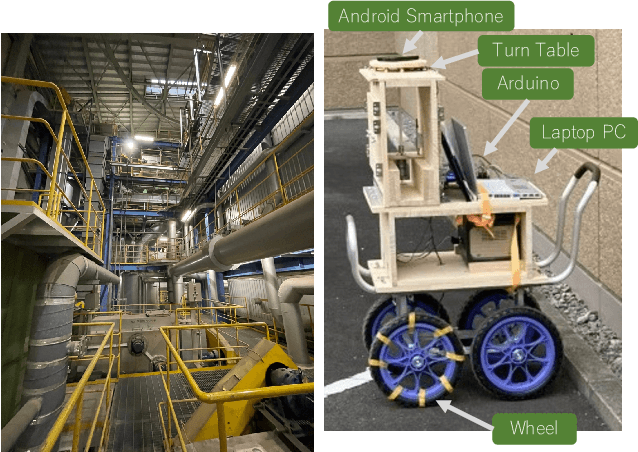
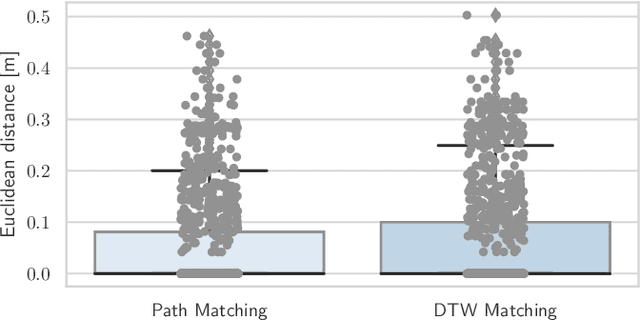
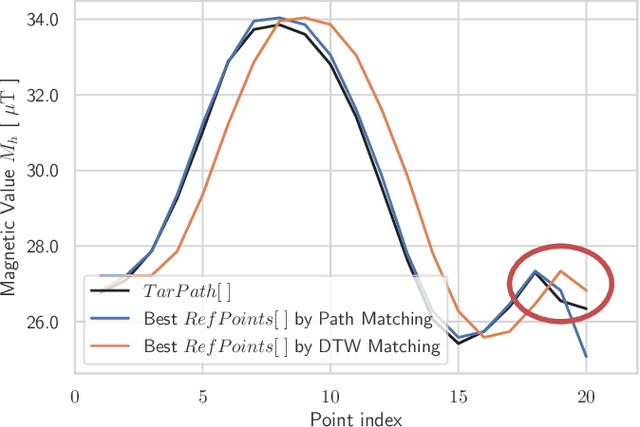
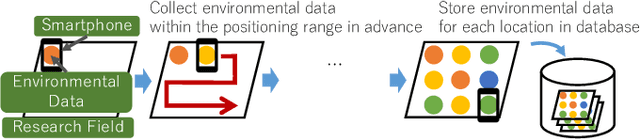
In an incineration plant, remote operation from a centralized control room is now possible, but inspection and cleaning of equipment still require a worker to visit the site. When the plant owner reduces the number of workers due to operation costs, it will be standard for a single worker to visit the site. Therefore, it is necessary to monitor the location of workers in real-time to detect unexpected human accidents quickly. Conventional methods use radio waves, such as Wi-Fi and Bluetooth, but there is little demand for communication equipment in the incineration plant. However, there is not enough demand for communication facilities in the incineration plant. It is too large to bear the cost of installing wireless access points, and Bluetooth Low Energy (BLE) beacons just for positioning. Therefore, we are focusing on magnetism using for indoor positioning method. In addition, the incineration plant has a lot of types of equipment that contains a wide range of magnetized metals, large motors, and generators. We could observe the magnetic peculiarity at each point. Based on these assumptions, we have developed a new indoor positioning method at the incineration plant. This paper describes the development of an indoor positioning system for an incineration plant. And we propose three methods for fingerprinting matching: Point matching, Path matching, and DTW matching. The average positioning errors of these methods are 6.89 m, 0.05 m, and 0.06 m, respectively.