 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDon't Get Yourself into Trouble! Risk-aware Decision-Making for Autonomous Vehicles
Jun 08, 2021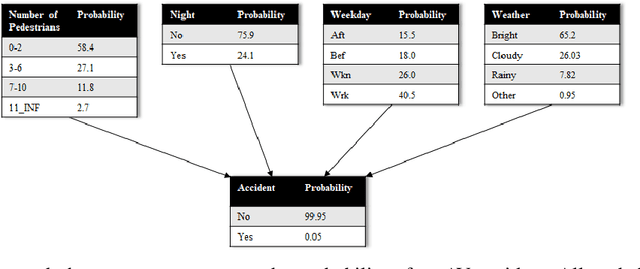
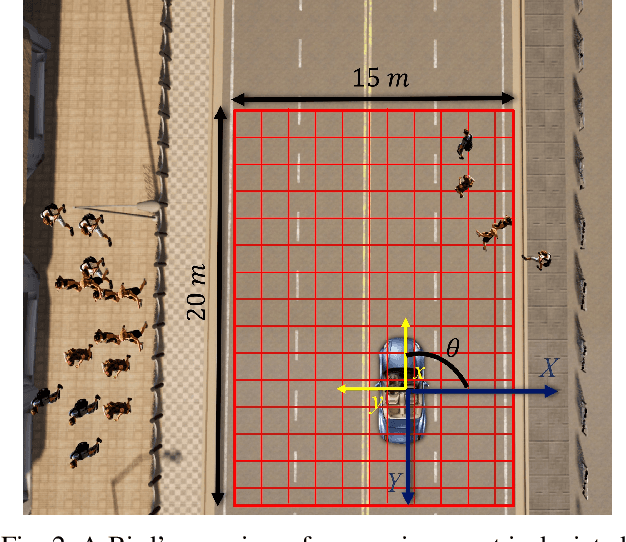
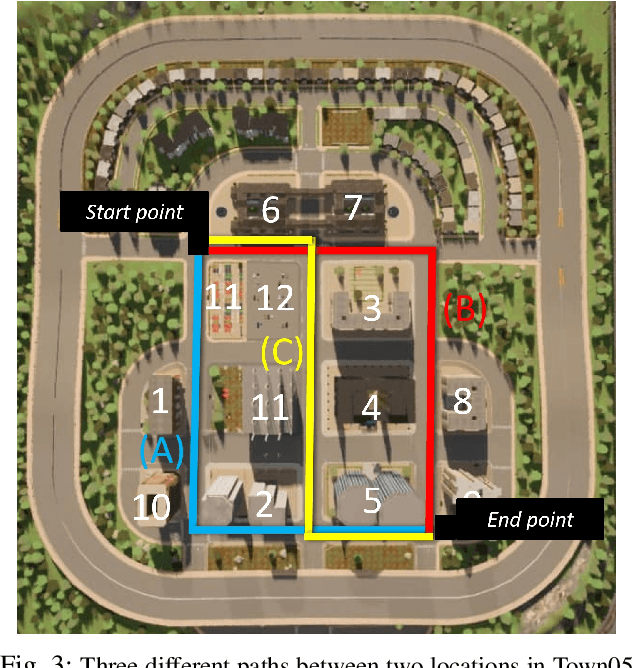
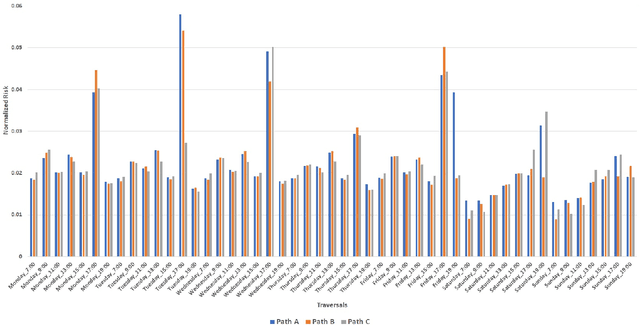
Risk is traditionally described as the expected likelihood of an undesirable outcome, such as collisions for autonomous vehicles. Accurately predicting risk or potentially risky situations is critical for the safe operation of autonomous vehicles. In our previous work, we showed that risk could be characterized by two components: 1) the probability of an undesirable outcome and 2) an estimate of how undesirable the outcome is (loss). This paper is an extension to our previous work. In this paper, using our trained deep reinforcement learning model for navigating around crowds, we developed a risk-based decision-making framework for the autonomous vehicle that integrates the high-level risk-based path planning with the reinforcement learning-based low-level control. We evaluated our method in a high-fidelity simulation such as CARLA. This work can improve safety by allowing an autonomous vehicle to one day avoid and react to risky situations.
Safe Deep Q-Network for Autonomous Vehicles at Unsignalized Intersection
Jun 08, 2021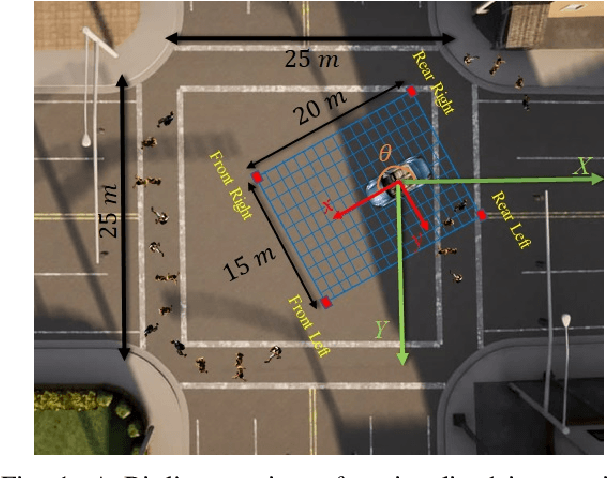
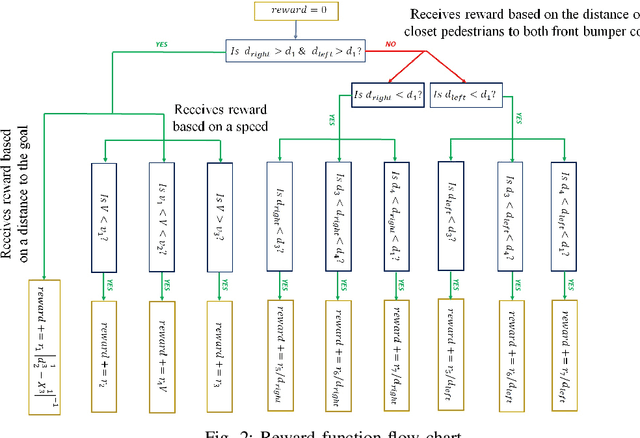
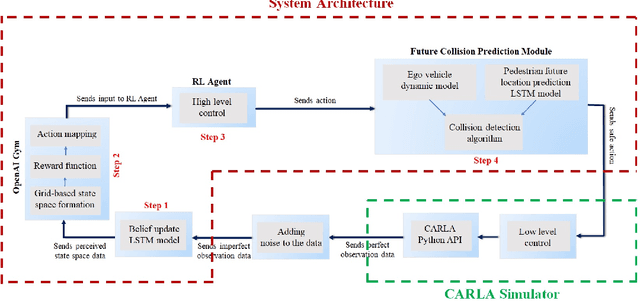
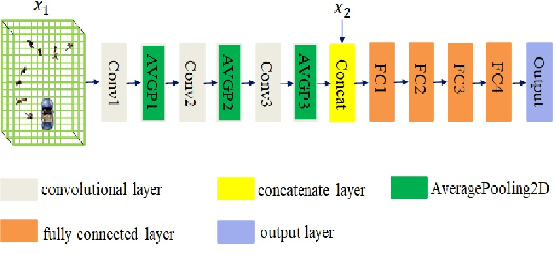
We propose a safe DRL approach for autonomous vehicle (AV) navigation through crowds of pedestrians while making a left turn at an unsignalized intersection. Our method uses two long-short term memory (LSTM) models that are trained to generate the perceived state of the environment and the future trajectories of pedestrians given noisy observations of their movement. A future collision prediction algorithm based on the future trajectories of the ego vehicle and pedestrians is used to mask unsafe actions if the system predicts a collision. The performance of our approach is evaluated in two experiments using the high-fidelity CARLA simulation environment. The first experiment tests the performance of our method at intersections that are similar to the training intersection and the second experiment tests our method at intersections with a different topology. For both experiments, our methods do not result in a collision with a pedestrian while still navigating the intersection at a reasonable speed.
Pedestrian Collision Avoidance for Autonomous Vehicles at Unsignalized Intersection Using Deep Q-Network
May 01, 2021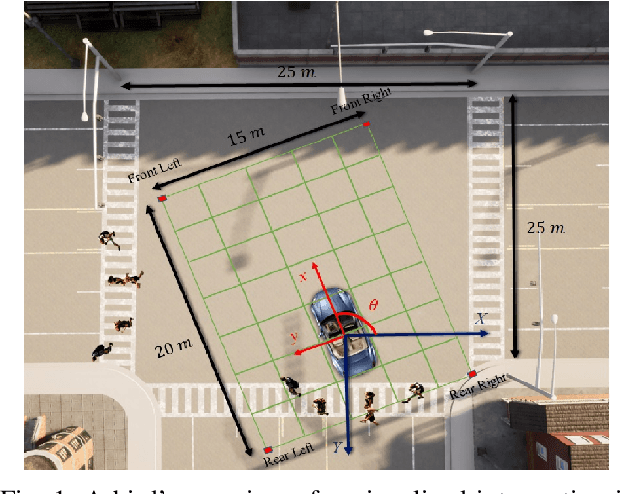
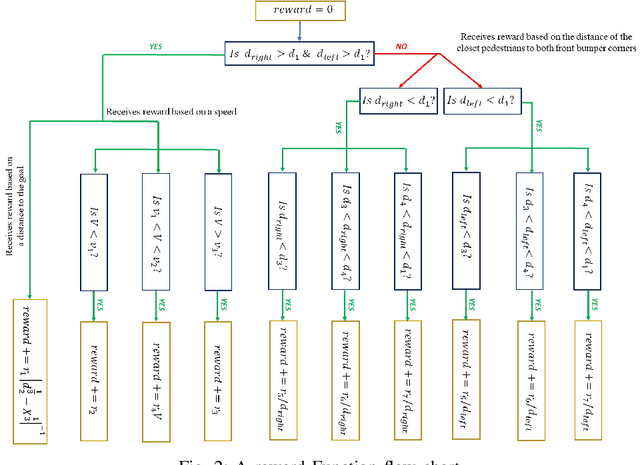
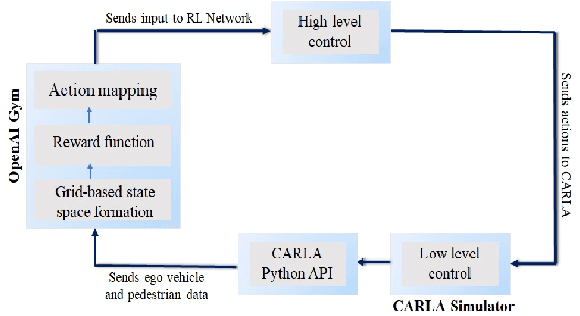
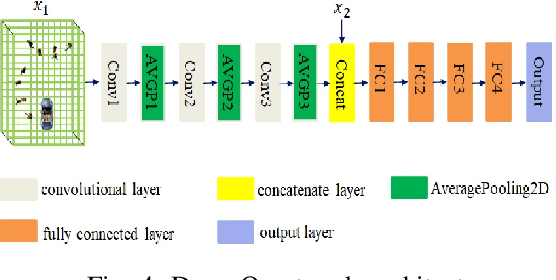
Prior research has extensively explored Autonomous Vehicle (AV) navigation in the presence of other vehicles, however, navigation among pedestrians, who are the most vulnerable element in urban environments, has been less examined. This paper explores AV navigation in crowded, unsignalized intersections. We compare the performance of different deep reinforcement learning methods trained on our reward function and state representation. The performance of these methods and a standard rule-based approach were evaluated in two ways, first at the unsignalized intersection on which the methods were trained, and secondly at an unknown unsignalized intersection with a different topology. For both scenarios, the rule-based method achieves less than 40\% collision-free episodes, whereas our methods result in a performance of approximately 100\%. Of the three methods used, DDQN/PER outperforms the other two methods while it also shows the smallest average intersection crossing time, the greatest average speed, and the greatest distance from the closest pedestrian.
The Pedestrian Patterns Dataset
Jan 06, 2020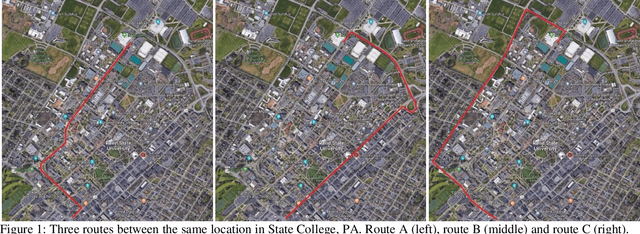



We present the pedestrian patterns dataset for autonomous driving. The dataset was collected by repeatedly traversing the same three routes for one week starting at different specific timeslots. The purpose of the dataset is to capture the patterns of social and pedestrian behavior along the traversed routes at different times and to eventually use this information to make predictions about the risk associated with autonomously traveling along different routes. This dataset contains the Full HD videos and GPS data for each traversal. Fast R-CNN pedestrian detection method is applied to the captured videos to count the number of pedestrians at each video frame in order to assess the density of pedestrians along a route. By providing this large-scale dataset to researchers, we hope to accelerate autonomous driving research not only to estimate the risk, both to the public and to the autonomous vehicle but also accelerate research on long-term vision-based localization of mobile robots and autonomous vehicles of the future.