 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Activity Recognition Method for Moderate Violence Detection
May 04, 2026Physical violence in public spaces is a significant public health concern, with minor incidents such as pushing often serving as precursors to more severe escalations. This research develops an automated system for the real-time detection of moderate physical violence, specifically pushing, in surveillance camera footage. The proposed solution integrates state-of-the-art computer vision models, utilizing YOLO11 and YOLO11-Pose for human detection and skeletal keypoint extraction. By calculating body inclination and joint angles between shoulders and hips, a Random Forest classifier was trained to distinguish between normal behavior and aggressive physical contact. The system's performance was evaluated through three progressive case studies representing increasing levels of difficulty. In controlled environments with frontal views, the model achieved a precision of 0.98. In the most challenging scenario, featuring high-altitude, steep-angle recordings from real-world surveillance infrastructure, the system maintained a precision of 0.72 despite significant perspective distortion and visual noise. These results demonstrate the feasibility of using skeletal analysis for early violence intervention in urban security contexts.
Interpretable Human Activity Recognition for Subtle Robbery Detection in Surveillance Videos
Apr 15, 2026Non-violent street robberies (snatch-and-run) are difficult to detect automatically because they are brief, subtle, and often indistinguishable from benign human interactions in unconstrained surveillance footage. This paper presents a hybrid, pose-driven approach for detecting snatch-and-run events that combines real-time perception with an interpretable classification stage suitable for edge deployment. The system uses a YOLO-based pose estimator to extract body keypoints for each tracked person and computes kinematic and interaction features describing hand speed, arm extension, proximity, and relative motion between an aggressor-victim pair. A Random Forest classifier is trained on these descriptors, and a temporal hysteresis filter is applied to stabilize frame-level predictions and reduce spurious alarms. We evaluate the method on a staged dataset and on a disjoint test set collected from internet videos, demonstrating promising generalization across different scenes and camera viewpoints. Finally, we implement the complete pipeline on an NVIDIA Jetson Nano and report real-time performance, supporting the feasibility of proactive, on-device robbery detection.
Path Planning using a One-shot-sampling Skeleton Map
Jul 03, 2025Path planning algorithms aim to compute a collision-free path, and many works focus on finding the optimal distance path. However, for some applications, a more suitable approach is to balance response time, safety of the paths, and path length. In this context, a skeleton map is a useful tool in graph-based schemes, as it provides an intrinsic representation of free configuration space. However, skeletonization algorithms are very resource-intensive, being primarily oriented towards image processing tasks. We propose an efficient path-planning methodology that finds safe paths within an acceptable processing time. This methodology leverages a Deep Denoising Auto-Encoder (DDAE) based on U-Net architecture to compute a skeletonized version of the navigation map, which we refer to as SkelUnet. The SkelUnet network facilitates exploration of the entire workspace through one-shot sampling (OSS), as opposed to the iterative process used by exact algorithms or the probabilistic sampling process. SkelUnet is trained and tested on a dataset consisting of 12,500 bi-dimensional dungeon maps. The motion planning methodology is evaluated in a simulation environment for an Unmanned Aerial Vehicle (UAV) using 250 previously unseen maps, and assessed with various navigation metrics to quantify the navigability of the computed paths. The results demonstrate that using SkelUnet to construct a roadmap offers significant advantages, such as connecting all regions of free workspace, providing safer paths, and reducing processing times. These characteristics make this method particularly suitable for mobile service robots in structured environments.
Detection of Tomato Ripening Stages using Yolov3-tiny
Feb 01, 2023One of the most important agricultural products in Mexico is the tomato (Solanum lycopersicum), which occupies the 4th place national most produced product . Therefore, it is necessary to improve its production, building automatic detection system that detect, classify an keep tacks of the fruits is one way to archieve it. So, in this paper, we address the design of a computer vision system to detect tomatoes at different ripening stages. To solve the problem, we use a neural network-based model for tomato classification and detection. Specifically, we use the YOLOv3-tiny model because it is one of the lightest current deep neural networks. To train it, we perform two grid searches testing several combinations of hyperparameters. Our experiments showed an f1-score of 90.0% in the localization and classification of ripening stages in a custom dataset.
A Comparison of Tiny-nerf versus Spatial Representations for 3d Reconstruction
Jan 27, 2023



Neural rendering has emerged as a powerful paradigm for synthesizing images, offering many benefits over classical rendering by using neural networks to reconstruct surfaces, represent shapes, and synthesize novel views, either for objects or scenes. In this neural rendering, the environment is encoded into a neural network. We believe that these new representations can be used to codify the scene for a mobile robot. Therefore, in this work, we perform a comparison between a trending neural rendering, called tiny-NeRF, and other volume representations that are commonly used as maps in robotics, such as voxel maps, point clouds, and triangular meshes. The target is to know the advantages and disadvantages of neural representations in the robotics context. The comparison is made in terms of spatial complexity and processing time to obtain a model. Experiments show that tiny-NeRF requires three times less memory space compared to other representations. In terms of processing time, tiny-NeRF takes about six times more to compute the model.
Spiral Trajectories for Building Inspection with Quadrotors
Feb 17, 2022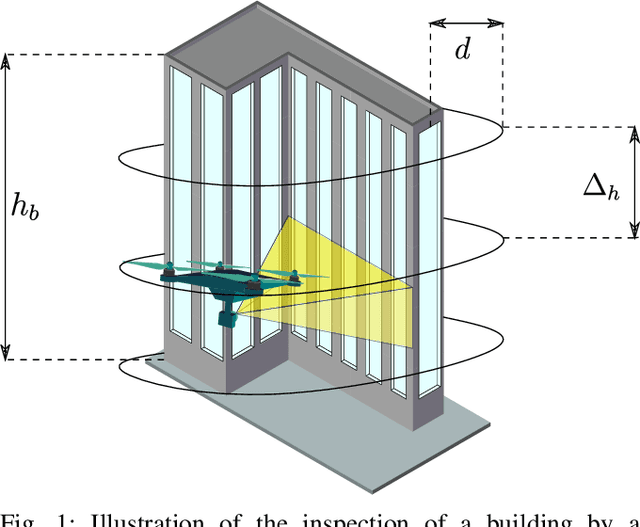
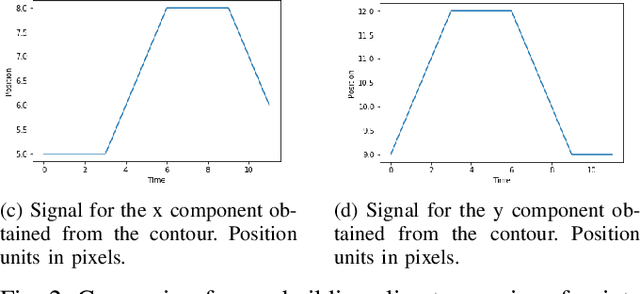
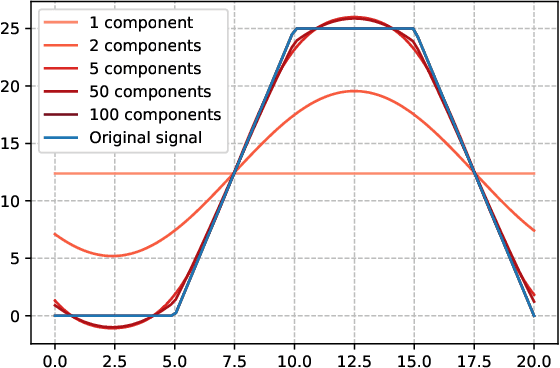
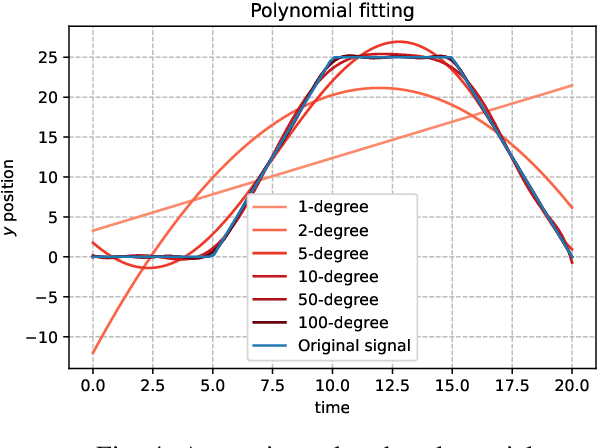
Inspection of large building is an important task since it can prevent material and human losses. A cheap and fast way to do the inspections is by sensors mounted on quadrotor vehicles. The challenge here is to compute a trajectory so that the building is completely observed while this same trajectory can be followed by the quadrotor in a smooth way. To address the problem, we propose a method that receives a 2.5D model of the target building and computes a smooth trajectory that can be followed by the quadrotor controller. The computed trajectory is a Fourier series that matches the desired behaviour. Our method has been tested in simulation and we have compared it against polynomial trajectories. Our result show that the method is efficient and can be applied to different building shapes.