 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGNS: A generalizable Graph Neural Network-based simulator for particulate and fluid modeling
Nov 18, 2022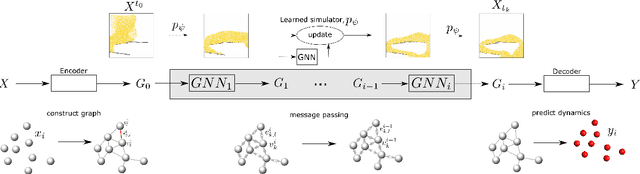
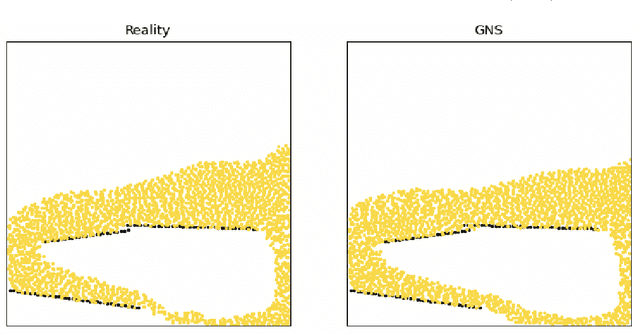

We develop a PyTorch-based Graph Network Simulator (GNS) that learns physics and predicts the flow behavior of particulate and fluid systems. GNS discretizes the domain with nodes representing a collection of material points and the links connecting the nodes representing the local interaction between particles or clusters of particles. The GNS learns the interaction laws through message passing on the graph. GNS has three components: (a) Encoder, which embeds particle information to a latent graph, the edges are learned functions; (b) Processor, which allows data propagation and computes the nodal interactions across steps; and (c) Decoder, which extracts the relevant dynamics (e.g., particle acceleration) from the graph. We introduce physics-inspired simple inductive biases, such as an inertial frame that allows learning algorithms to prioritize one solution (constant gravitational acceleration) over another, reducing learning time. The GNS implementation uses semi-implicit Euler integration to update the next state based on the predicted accelerations. GNS trained on trajectory data is generalizable to predict particle kinematics in complex boundary conditions not seen during training. The trained model accurately predicts within a 5\% error of its associated material point method (MPM) simulation. The predictions are 5,000x faster than traditional MPM simulations (2.5 hours for MPM simulations versus 20 s for GNS simulation of granular flow). GNS surrogates are popular for solving optimization, control, critical-region prediction for in situ viz, and inverse-type problems. The GNS code is available under the open-source MIT license at https://github.com/geoelements/gns.
Minority Report: A Graph Network Oracle for In Situ Visualization
Jun 25, 2022
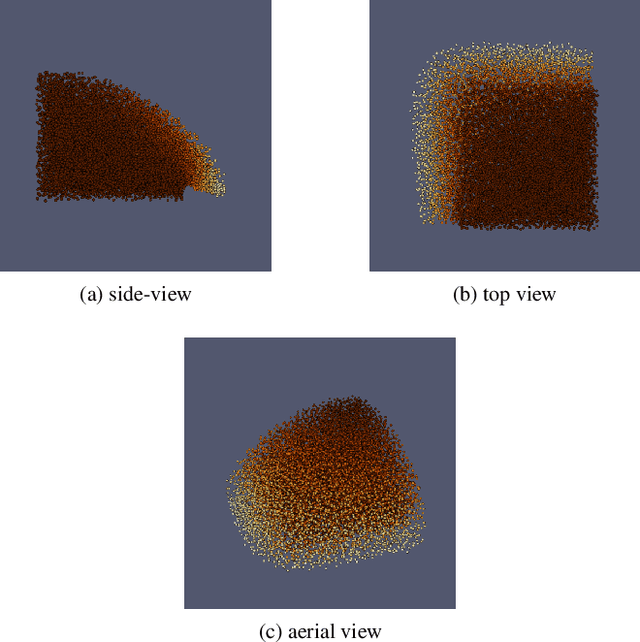
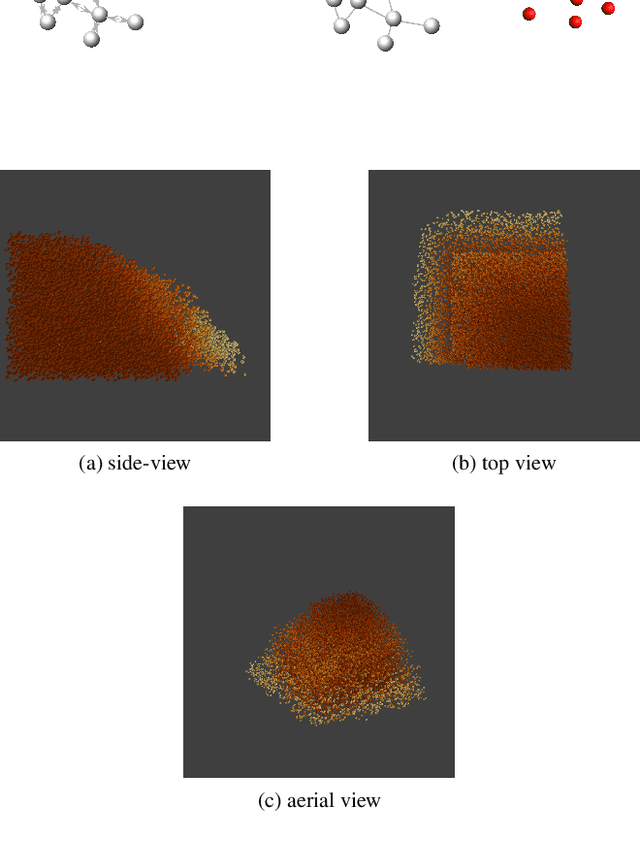
In situ visualization techniques are hampered by a lack of foresight: crucial simulation phenomena can be missed due to a poor sampling rate or insufficient detail at critical timesteps. Keeping a human in the loop is impractical, and defining statistical triggers can be difficult. This paper demonstrates the potential for using a machine-learning-based simulation surrogate as an oracle to identify expected critical regions of a large-scale simulation. These critical regions are used to drive the in situ analysis, providing greater data fidelity and analysis resolution with an equivalent I/O budget to a traditional in situ framework. We develop a distributed asynchronous in situ visualization by integrating TACC Galaxy with CB-Geo MPM for material point simulation of granular flows. We employ a PyTorch-based 3D Graph Network Simulator (GNS) trained on granular flow problems as an oracle to predict the dynamics of granular flows. Critical regions of interests are manually tagged in GNS for in situ rendering in MPM.