 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOCAIRE: Forecasting and Monitoring Urban Air Quality in Madrid
Nov 19, 2020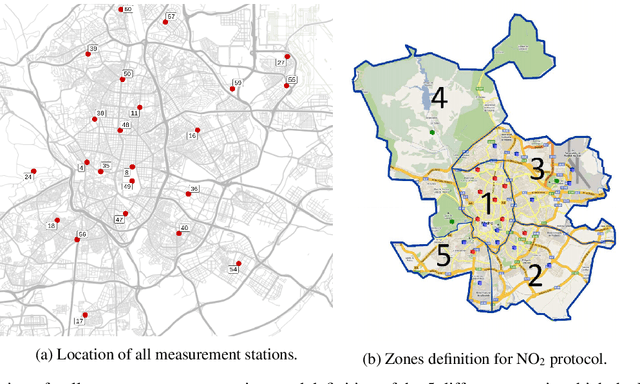
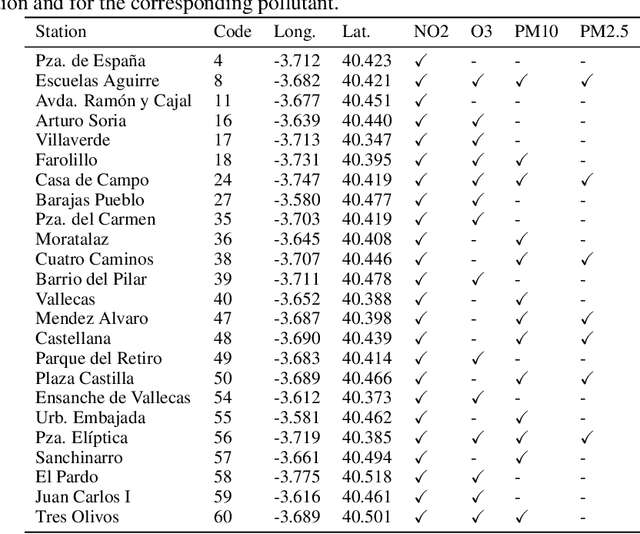
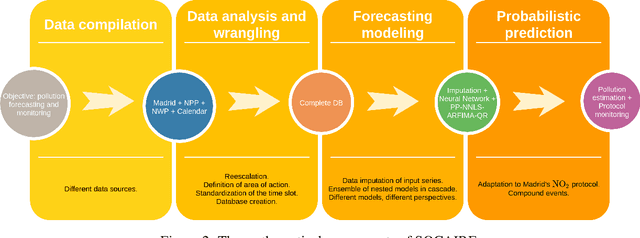

Air quality has become one of the main issues in public health and urban planning management, due to the proven adverse effects of high pollutant concentrations. Considering the mitigation measures that cities all over the world are taking in order to face frequent low air quality episodes, the capability of foreseeing future pollutant concentrations is of great importance. Through this paper, we present SOCAIRE, an operational tool based on a Bayesian and spatiotemporal ensemble of neural and statistical nested models. SOCAIRE integrates endogenous and exogenous information in order to predict and monitor future distributions of the concentration for several pollutants in the city of Madrid. It focuses on modeling each and every available component which might play a role in air quality: past concentrations of pollutants, human activity, numerical pollution estimation, and numerical weather predictions. This tool is currently in operation in Madrid, producing daily air quality predictions for the next 48 hours and anticipating the probability of the activation of the measures included in the city's official air quality \no protocols through probabilistic inferences about compound events.
On the Inclusion of Spatial Information for Spatio-Temporal Neural Networks
Jul 15, 2020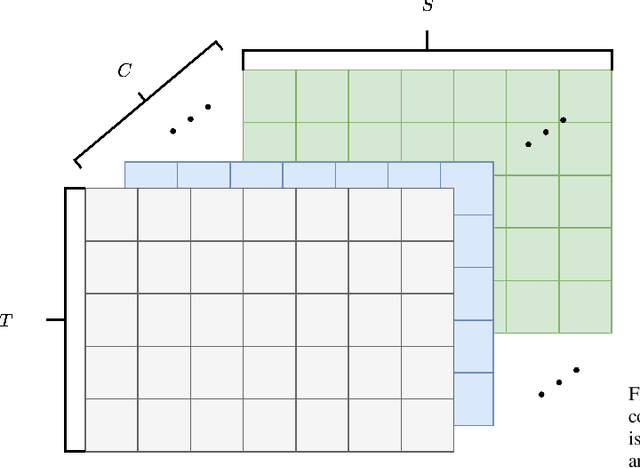
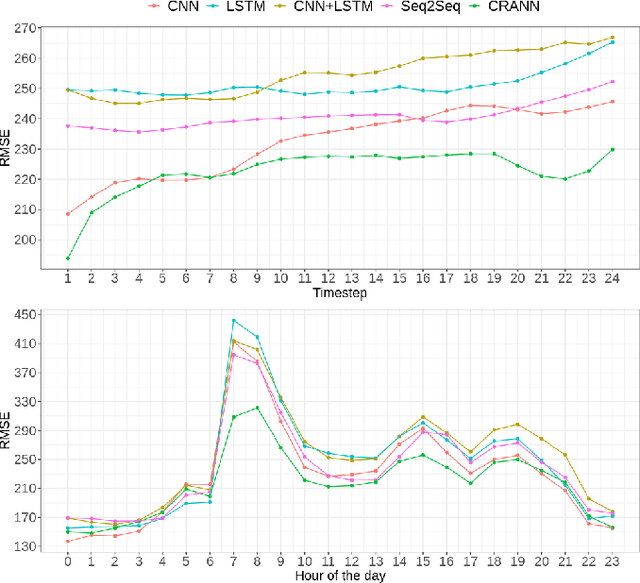
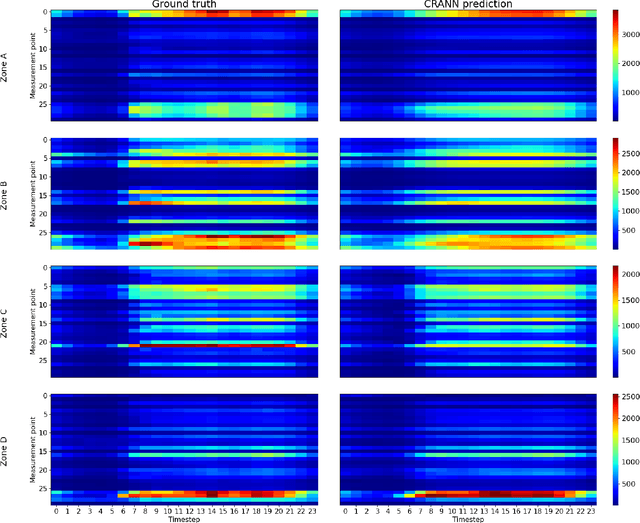
When confronting a spatio-temporal regression, it is sensible to feed the model with any available prior information about the spatial dimension. For example, it is common to define the architecture of neural networks based on spatial closeness, adjacency, or correlation. A common alternative, if spatial information is not available or is too costly to introduce it in the model, is to learn it as an extra step of the model. While the use of prior spatial knowledge, given or learnt, might be beneficial, in this work we question this principle by comparing spatial agnostic neural networks with state of the art models. Our results show that the typical inclusion of prior spatial information is not really needed in most cases. In order to validate this counterintuitive result, we perform thorough experiments over ten different datasets related to sustainable mobility and air quality, substantiating our conclusions on real world problems with direct implications for public health and economy.
A Spatio-Temporal Spot-Forecasting Framework for Urban Traffic Prediction
Apr 01, 2020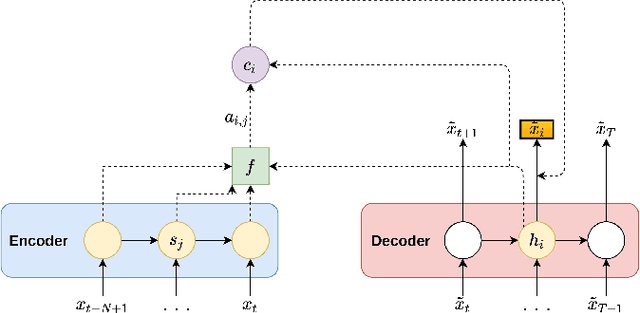

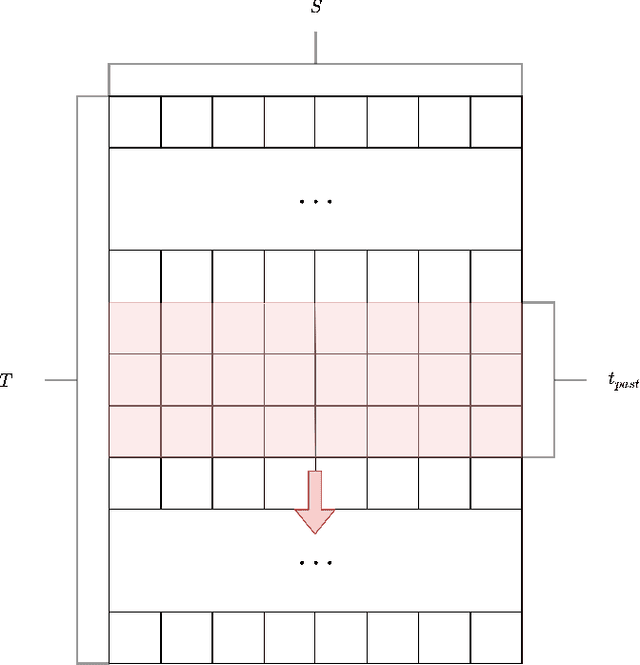
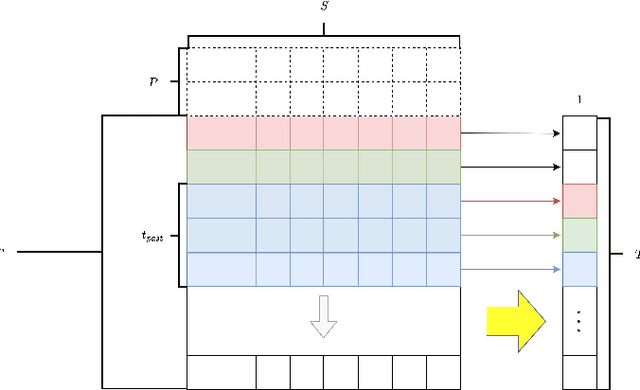
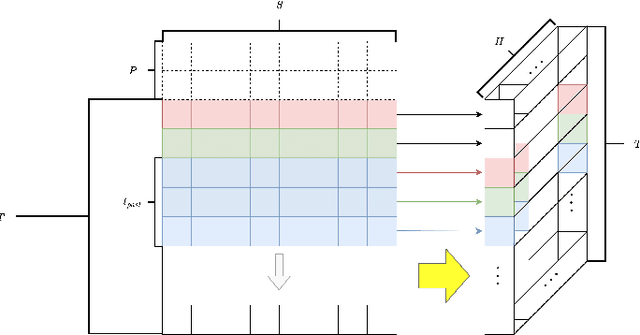
Spatio-temporal forecasting is an open research field whose interest is growing exponentially. In this work we focus on creating a complex deep neural framework for spatio-temporal traffic forecasting with comparatively very good performance and that shows to be adaptable over several spatio-temporal conditions while remaining easy to understand and interpret. Our proposal is based on an interpretable attention-based neural network in which several modules are combined in order to capture key spatio-temporal time series components. Through extensive experimentation, we show how the results of our approach are stable and better than those of other state-of-the-art alternatives.
Probabilistic forecasting approaches for extreme NO$_2$ episodes: a comparison of models
Mar 24, 2020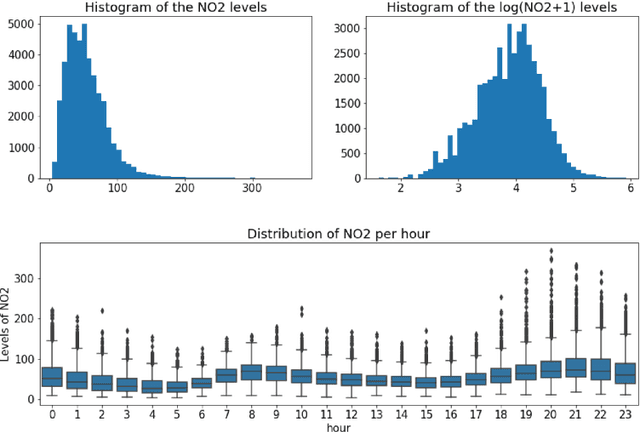
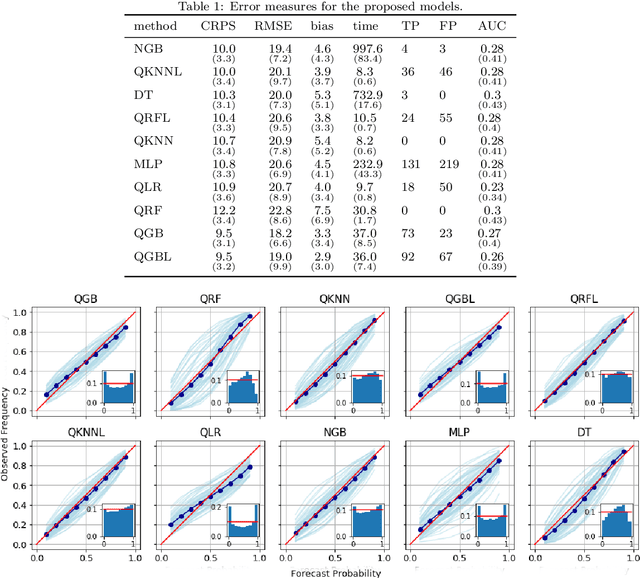
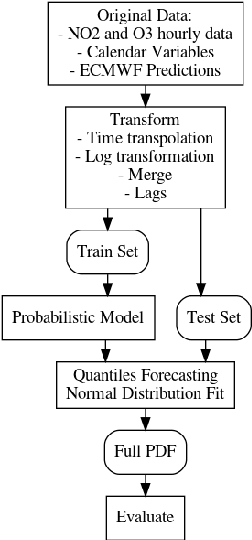
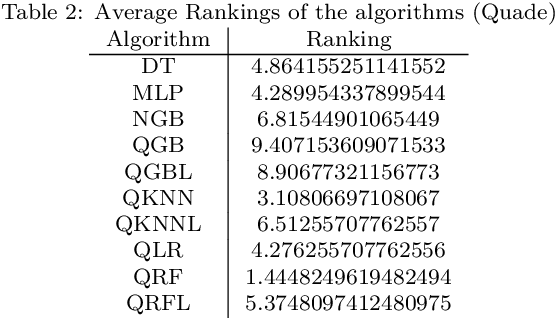
High concentration episodes for NO$_2$ are increasingly dealt with by authorities through traffic restrictions which are activated when air quality deteriorates beyond certain thresholds. Foreseeing the probability that pollutant concentrations reach those thresholds becomes thus a necessity. Probabilistic forecasting is a family of techniques that allow for the prediction of the expected distribution function instead of a single value. In the case of NO$_2$, it allows for the calculation of future chances of exceeding thresholds and to detect pollution peaks. We thoroughly compared 10 state of the art probabilistic predictive models, using them to predict the distribution of NO$_2$ concentrations in a urban location for a set of forecasting horizons (up to 60 hours). Quantile gradient boosted trees shows the best performance, yielding the best results for both the expected value and the forecast full distribution. Furthermore, we show how this approach can be used to detect pollution peaks.