 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Experimental Review on Deep Learning Architectures for Time Series Forecasting
Apr 08, 2021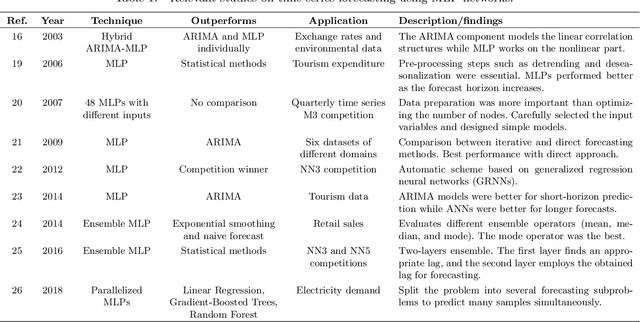
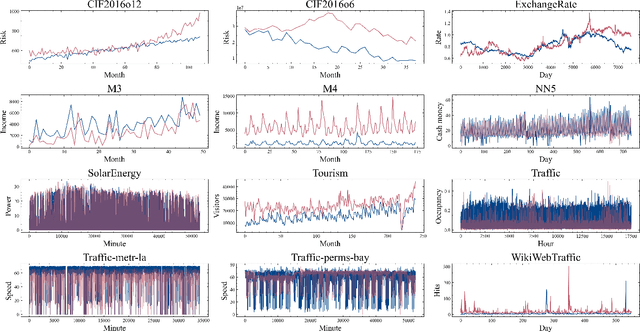
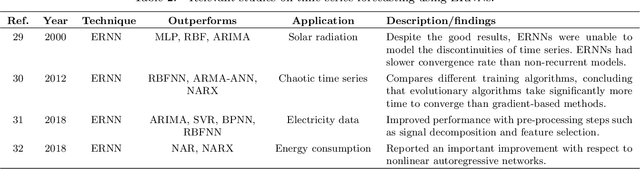
In recent years, deep learning techniques have outperformed traditional models in many machine learning tasks. Deep neural networks have successfully been applied to address time series forecasting problems, which is a very important topic in data mining. They have proved to be an effective solution given their capacity to automatically learn the temporal dependencies present in time series. However, selecting the most convenient type of deep neural network and its parametrization is a complex task that requires considerable expertise. Therefore, there is a need for deeper studies on the suitability of all existing architectures for different forecasting tasks. In this work, we face two main challenges: a comprehensive review of the latest works using deep learning for time series forecasting; and an experimental study comparing the performance of the most popular architectures. The comparison involves a thorough analysis of seven types of deep learning models in terms of accuracy and efficiency. We evaluate the rankings and distribution of results obtained with the proposed models under many different architecture configurations and training hyperparameters. The datasets used comprise more than 50000 time series divided into 12 different forecasting problems. By training more than 38000 models on these data, we provide the most extensive deep learning study for time series forecasting. Among all studied models, the results show that long short-term memory (LSTM) and convolutional networks (CNN) are the best alternatives, with LSTMs obtaining the most accurate forecasts. CNNs achieve comparable performance with less variability of results under different parameter configurations, while also being more efficient.
Enhancing Object Detection for Autonomous Driving by Optimizing Anchor Generation and Addressing Class Imbalance
Apr 08, 2021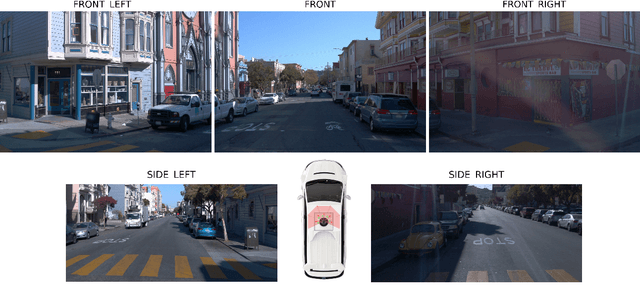
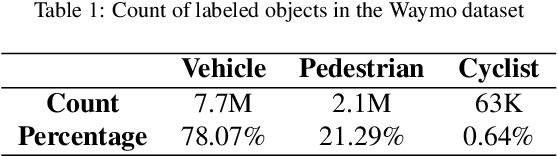
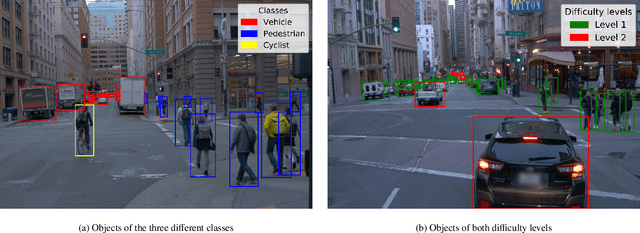
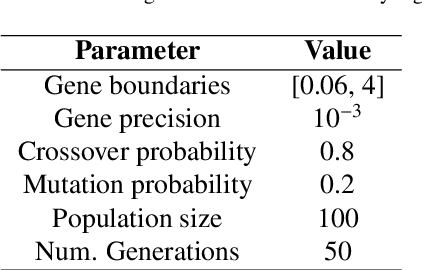
Object detection has been one of the most active topics in computer vision for the past years. Recent works have mainly focused on pushing the state-of-the-art in the general-purpose COCO benchmark. However, the use of such detection frameworks in specific applications such as autonomous driving is yet an area to be addressed. This study presents an enhanced 2D object detector based on Faster R-CNN that is better suited for the context of autonomous vehicles. Two main aspects are improved: the anchor generation procedure and the performance drop in minority classes. The default uniform anchor configuration is not suitable in this scenario due to the perspective projection of the vehicle cameras. Therefore, we propose a perspective-aware methodology that divides the image into key regions via clustering and uses evolutionary algorithms to optimize the base anchors for each of them. Furthermore, we add a module that enhances the precision of the second-stage header network by including the spatial information of the candidate regions proposed in the first stage. We also explore different re-weighting strategies to address the foreground-foreground class imbalance, showing that the use of a reduced version of focal loss can significantly improve the detection of difficult and underrepresented objects in two-stage detectors. Finally, we design an ensemble model to combine the strengths of the different learning strategies. Our proposal is evaluated with the Waymo Open Dataset, which is the most extensive and diverse up to date. The results demonstrate an average accuracy improvement of 6.13% mAP when using the best single model, and of 9.69% mAP with the ensemble. The proposed modifications over the Faster R-CNN do not increase computational cost and can easily be extended to optimize other anchor-based detection frameworks.
On the performance of deep learning models for time series classification in streaming
Apr 03, 2020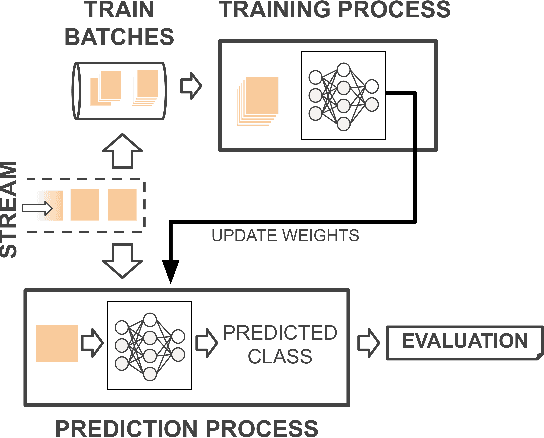
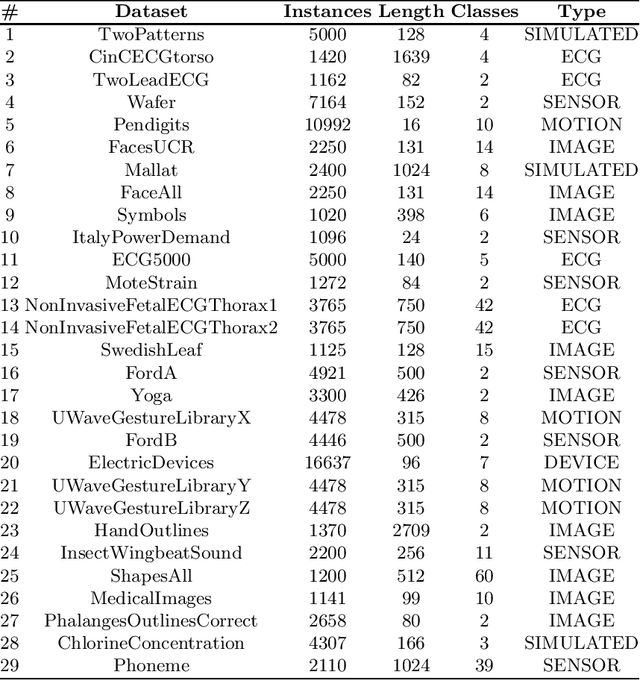
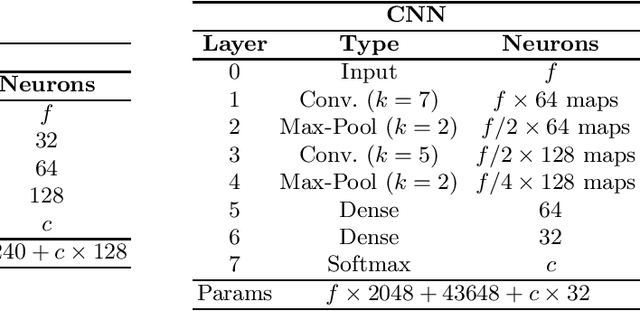
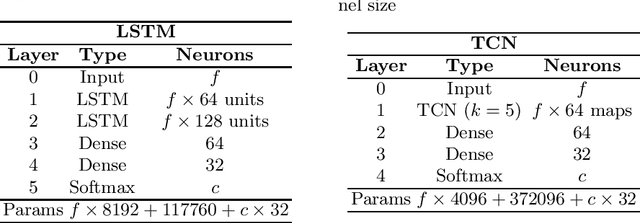
Processing data streams arriving at high speed requires the development of models that can provide fast and accurate predictions. Although deep neural networks are the state-of-the-art for many machine learning tasks, their performance in real-time data streaming scenarios is a research area that has not yet been fully addressed. Nevertheless, there have been recent efforts to adapt complex deep learning models for streaming tasks by reducing their processing rate. The design of the asynchronous dual-pipeline deep learning framework allows to predict over incoming instances and update the model simultaneously using two separate layers. The aim of this work is to assess the performance of different types of deep architectures for data streaming classification using this framework. We evaluate models such as multi-layer perceptrons, recurrent, convolutional and temporal convolutional neural networks over several time-series datasets that are simulated as streams. The obtained results indicate that convolutional architectures achieve a higher performance in terms of accuracy and efficiency.