 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim2Real Reinforcement Learning for Soccer skills
Dec 13, 2025This thesis work presents a more efficient and effective approach to training control-related tasks for humanoid robots using Reinforcement Learning (RL). The traditional RL methods are limited in adapting to real-world environments, complexity, and natural motions, but the proposed approach overcomes these limitations by using curriculum training and Adversarial Motion Priors (AMP) technique. The results show that the developed RL policies for kicking, walking, and jumping are more dynamic, and adaptive, and outperformed previous methods. However, the transfer of the learned policy from simulation to the real world was unsuccessful, highlighting the limitations of current RL methods in fully adapting to real-world scenarios.
Learning to Get Up Across Morphologies: Zero-Shot Recovery with a Unified Humanoid Policy
Dec 13, 2025Fall recovery is a critical skill for humanoid robots in dynamic environments such as RoboCup, where prolonged downtime often decides the match. Recent techniques using deep reinforcement learning (DRL) have produced robust get-up behaviors, yet existing methods require training of separate policies for each robot morphology. This paper presents a single DRL policy capable of recovering from falls across seven humanoid robots with diverse heights (0.48 - 0.81 m), weights (2.8 - 7.9 kg), and dynamics. Trained with CrossQ, the unified policy transfers zero-shot up to 86 +/- 7% (95% CI [81, 89]) on unseen morphologies, eliminating the need for robot-specific training. Comprehensive leave-one-out experiments, morph scaling analysis, and diversity ablations show that targeted morphological coverage improves zero-shot generalization. In some cases, the shared policy even surpasses the specialist baselines. These findings illustrate the practicality of morphology-agnostic control for fall recovery, laying the foundation for generalist humanoid control. The software is open-source and available at: https://github.com/utra-robosoccer/unified-humanoid-getup
NoFADE: Analyzing Diminishing Returns on CO2 Investment
Nov 28, 2021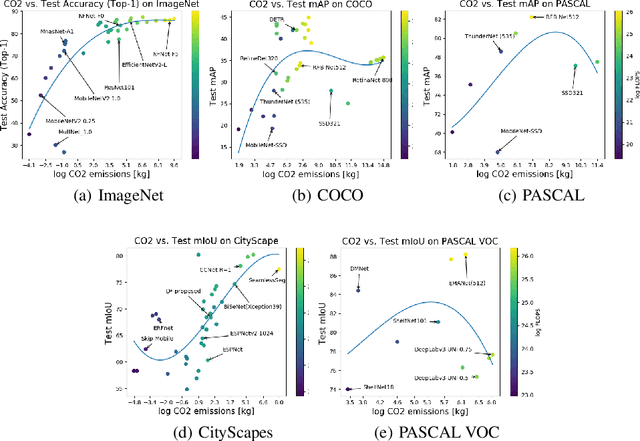

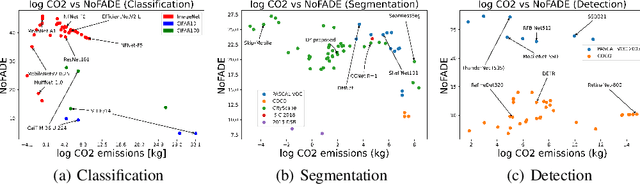
Climate change continues to be a pressing issue that currently affects society at-large. It is important that we as a society, including the Computer Vision (CV) community take steps to limit our impact on the environment. In this paper, we (a) analyze the effect of diminishing returns on CV methods, and (b) propose a \textit{``NoFADE''}: a novel entropy-based metric to quantify model--dataset--complexity relationships. We show that some CV tasks are reaching saturation, while others are almost fully saturated. In this light, NoFADE allows the CV community to compare models and datasets on a similar basis, establishing an agnostic platform.