 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCable Estimation-Based Control for Wire-Borne Underactuated Brachiating Robots: A Combined Direct-Indirect Adaptive Robust Approach
Aug 11, 2020
In this paper, we present an online adaptive robust control framework for underactuated brachiating robots traversing flexible cables. Since the dynamic model of a flexible body is unknown in practice, we propose an indirect adaptive estimation scheme to approximate the unknown dynamic effects of the flexible cable as an external force with parametric uncertainties. A boundary layer-based sliding mode control is then designed to compensate for the residual unmodeled dynamics and time-varying disturbances, in which the control gain is updated by an auxiliary direct adaptive control mechanism. Stability analysis and derivation of adaptation laws are carried out through a Lyapunov approach, which formally guarantees the stability and tracking performance of the robot-cable system. Simulation experiments and comparison with a baseline controller show that the combined direct-indirect adaptive robust control framework achieves reliable tracking performance and adaptive system identification, enabling the robot to traverse flexible cables in the presence of unmodeled dynamics, parametric uncertainties and unstructured disturbances.
Robust Control Synthesis and Verification for Wire-Borne Underactuated Brachiating Robots Using Sum-of-Squares Optimization
Jul 23, 2020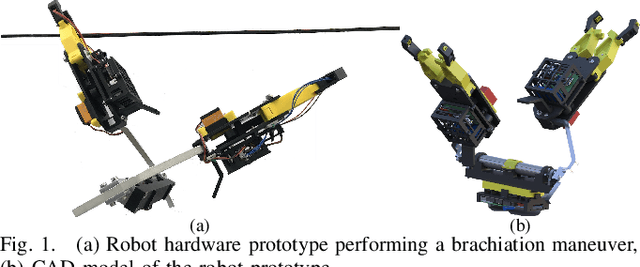
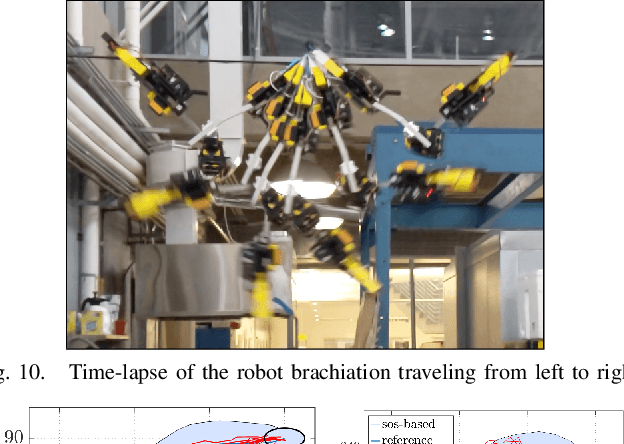
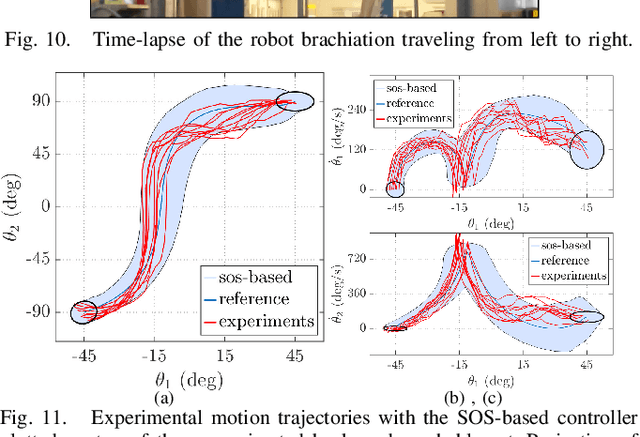
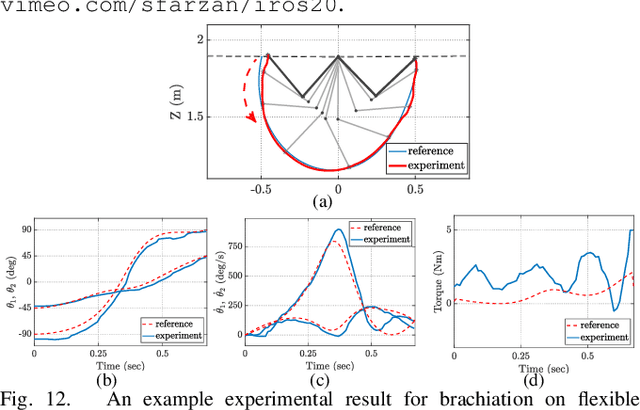
Control of wire-borne underactuated brachiating robots requires a robust feedback control design that can deal with dynamic uncertainties, actuator constraints and unmeasurable states. In this paper, we develop a robust feedback control for brachiating on flexible cables, building on previous work on optimal trajectory generation and time-varying LQR controller design. We propose a novel simplified model for approximation of the flexible cable dynamics, which enables inclusion of parametric model uncertainties in the system. We then use semidefinite programming (SDP) and sum-of-squares (SOS) optimization to synthesize a time-varying feedback control with formal robustness guarantees to account for model uncertainties and unmeasurable states in the system. Through simulation, hardware experiments and comparison with a time-varying LQR controller, it is shown that the proposed robust controller results in relatively large robust backward reachable sets and is able to reliably track a pre-generated optimal trajectory and achieve the desired brachiating motion in the presence of parametric model uncertainties, actuator limits, and unobservable states.
Feedback Control for Autonomous Riding of Hovershoes by a Cassie Bipedal Robot
Jul 26, 2019

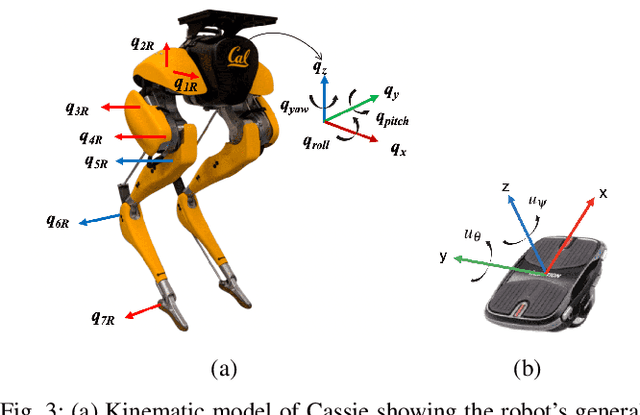
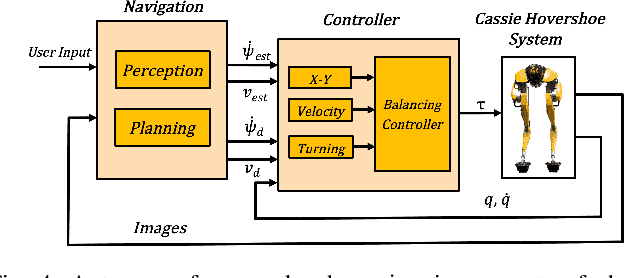
Motivated towards achieving multi-modal locomotion, in this paper, we develop a framework for a bipedal robot to dynamically ride a pair of Hovershoes over various terrain. Our developed control strategy enables the Cassie bipedal robot to interact with the Hovershoes to balance, regulate forward and rotational velocity, achieve fast turns, and move over flat terrain, slopes, stairs, and rough outdoor terrain. Our sensor suite comprising of VIO and depth sensors for visual SLAM as well as our Dijkstra-based global planner and timed elastic band based local planning framework enables us to achieve autonomous riding on the Hovershoes while navigating an obstacle course. We present numerical and experimental validations of our work.