 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Nonvolatile Switchable-polarity EPM Valve
Mar 25, 2026Scalable control of pneumatic and fluidic networks remains fundamentally constrained by architectures that require continuous power input, dense external control hardware, and fixed routing topologies. Current valve arrays rely on such continuous actuation and mechanically fixed routing, imposing substantial thermal and architectural overhead. Here, we introduce the Switchable-polarity ElectroPermanent Magnet (S-EPM), a fundamentally new bistable magnetic architecture that deterministically reverses its external magnetic polarity through transient electrical excitation. By reconfiguring internal flux pathways within a composite magnet assembly, the S-EPM establishes two stable, opposing magnetic configurations without requiring sustained power. We integrate this architecture into a compact pinch-valve to robustly control pneumatic and liquid media. This state-encoded magnetic control enables logic-embedded fluidic networks, including decoders, hierarchical distribution modules, and a nonvolatile six-port routing array. These systems provide address-based routing and programmable compositional control, offering features like individual port isolation that are impossible with standard mechanically coupled rotary valves. By embedding functionality in persistent magnetic states rather than continuous power or static plumbing, this work establishes a scalable foundation for digital fluidics and autonomous laboratory platforms.
Fluidic FlowBots: Intelligence embodied in the characteristics of recirculating fluid flow
Dec 08, 2023


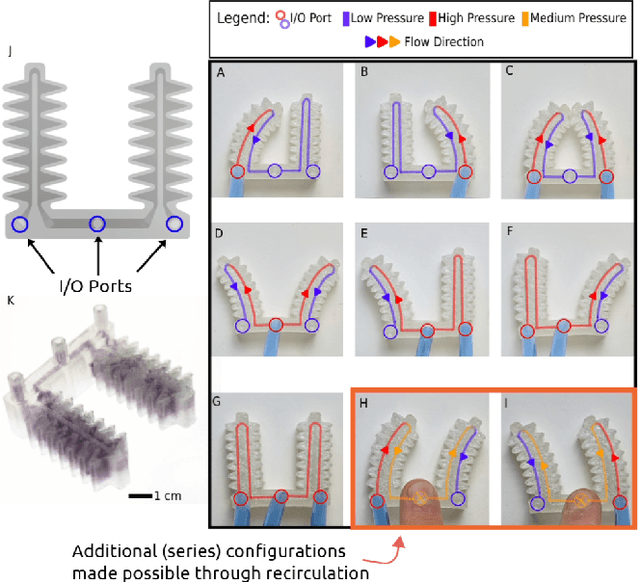
The one-to-one mapping of control inputs to actuator outputs results in elaborate routing architectures that limit how complex fluidic soft robot behaviours can currently become. Embodied intelligence can be used as a tool to counteract this phenomenon. Control functionality can be embedded directly into actuators by leveraging the characteristics of fluid flow phenomena. Whilst prior soft robotics work has focused exclusively on actuators operating in a state of transient/no flow (constant pressure), or pulsatile/alternating flow, our work begins to explore the possibilities granted by operating in the closed-loop flow recirculation regime. Here we introduce the concept of FlowBots: soft robots that utilise the characteristics of continuous fluid flow to enable the embodiment of complex control functionality directly into the structure of the robot. FlowBots have robust, integrated, no-moving-part control systems, and these architectures enable: monolithic additive manufacturing methods, rapid prototyping, greater sustainability, and an expansive range of applications. Based on three FlowBot examples: a bidirectional actuator, a gripper, and a quadruped swimmer - we demonstrate how the characteristics of flow recirculation contribute to simplifications in fluidic analogue control architectures. We conclude by outlining our design and rapid prototyping methodology to empower others in the field to explore this new, emerging design field, and design their own FlowBots.