 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied sensorimotor control: computational modeling of the neural control of movement
Sep 17, 2025



We review how sensorimotor control is dictated by interacting neural populations, optimal feedback mechanisms, and the biomechanics of bodies. First, we outline the distributed anatomical loops that shuttle sensorimotor signals between cortex, subcortical regions, and spinal cord. We then summarize evidence that neural population activity occupies low-dimensional, dynamically evolving manifolds during planning and execution of movements. Next, we summarize literature explaining motor behavior through the lens of optimal control theory, which clarifies the role of internal models and feedback during motor control. Finally, recent studies on embodied sensorimotor control address gaps within each framework by aiming to elucidate neural population activity through the explicit control of musculoskeletal dynamics. We close by discussing open problems and opportunities: multi-tasking and cognitively rich behavior, multi-regional circuit models, and the level of anatomical detail needed in body and network models. Together, this review and recent advances point towards reaching an integrative account of the neural control of movement.
Understanding the Spectral Bias of Coordinate Based MLPs Via Training Dynamics
Jan 18, 2023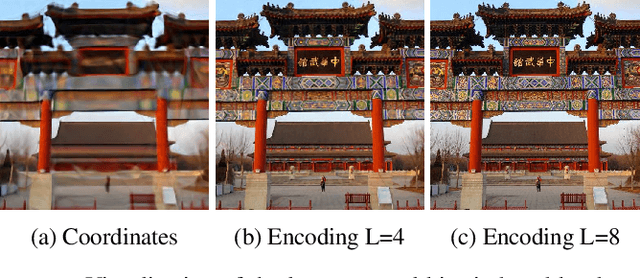
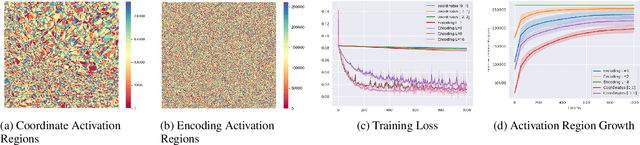
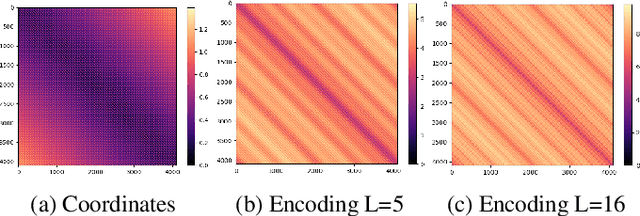
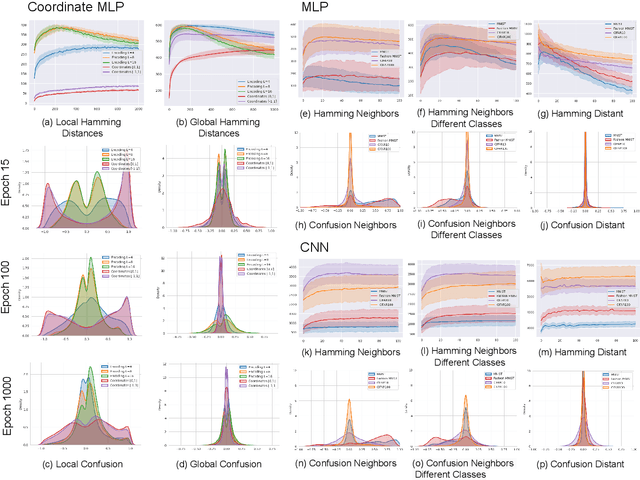
Recently, multi-layer perceptrons (MLPs) with ReLU activations have enabled new photo-realistic rendering techniques by encoding scene properties using their weights. For these models, termed coordinate based MLPs, sinusoidal encodings are necessary in allowing for convergence to the high frequency components of the signal due to their severe spectral bias. Previous work has explained this phenomenon using Neural Tangent Kernel (NTK) and Fourier analysis. However, the kernel regime does not expose the properties of the network that induce this behavior, and the Fourier decomposition is global, not allowing for insight on the network's local dynamics. A new interpretation of spectral bias directly through ReLU network computations would expose their limitations in dense settings, while providing a clearer explanation as to how this behavior emerges during the learning process. In this paper, we provide the first study of spectral bias in a coordinate based MLP through its activation regions and gradient descent dynamics, specifically using gradient confusion. We relate the confusion between inputs to the distinctiveness of their activation patterns, and find higher amounts of confusion when expressive power is limited. This leads to slower convergence to the high frequency components of the signal, which is magnified by the density of coordinates. Additionally, this method allows us to analyze the properties of the activation regions as spectral bias is reduced, in which we find distinct dynamics.