 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Sensing Subserves Task-Level Control
May 21, 2026Active sensing is traditionally defined as the expenditure of energy, typically in the form of movement, for obtaining information. Here, we propose that the combination of reliance on adaptive sensors, the linkage between movement and sensing, and task-level control inevitably gives rise to the emergence of active sensing movements. In this way, active sensing is not driven by sensory goals, such as minimizing uncertainty about the state, but rather is necessary for task-level control. This hypothesis, that active sensing subserves control, is supported by both empirical data from organisms and mathematical theory. Interestingly, active sensing behaviors often occur in discrete epochs, interspersed with goal-oriented behavior. This suggests that animals switch between two behavioral modes with distinct control policies, an `explore' mode in which animals produce dynamic movements to shape sensory feedback, and an `exploit' mode in which animals produce slower compensatory movements that are directly related to achieving task goals. This strategy for feedback control that relies on adaptive sensors, active sensing, and mode switching is not commonly used in engineered systems despite being ubiquitous in biology. Engineered systems comprising state-of-the-art sensors, actuators, and mechanical designs can outperform animals with respect to ``cost functions'' such as maximum force generation, precision, and speed. Nevertheless, animals routinely achieve robust, graceful behaviors that are currently unmatched by engineered systems, suggesting that current control systems are insufficient. These insights, expressed in the language of control theory, may be critical for improving robotic sensing and control.
Staying the course: Locating equilibria of dynamical systems on Riemannian manifolds defined by point-clouds
Apr 21, 2022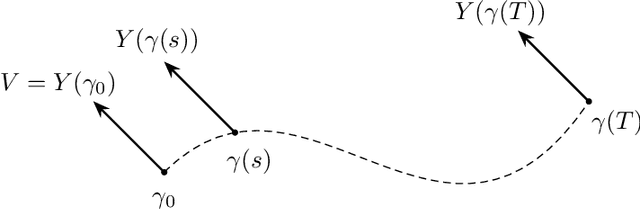
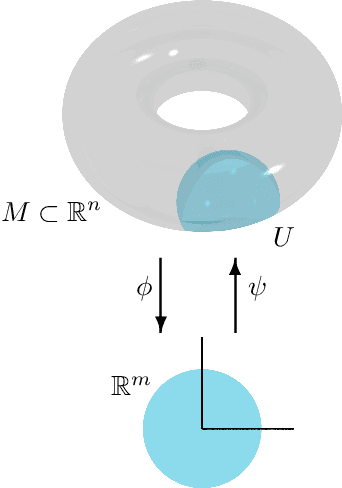
We introduce a method to successively locate equilibria (steady states) of dynamical systems on Riemannian manifolds. The manifolds need not be characterized by an atlas or by the zeros of a smooth map. Instead, they can be defined by point-clouds and sampled as needed through an iterative process. If the manifold is an Euclidean space, our method follows isoclines, curves along which the direction of the vector field $X$ is constant. For a generic vector field $X$, isoclines are smooth curves and every equilibrium is a limit point of isoclines. We generalize the definition of isoclines to Riemannian manifolds through the use of parallel transport: generalized isoclines are curves along which the directions of $X$ are parallel transports of each other. As in the Euclidean case, generalized isoclines of generic vector fields $X$ are smooth curves that connect equilibria of $X$. Our work is motivated by computational statistical mechanics, specifically high dimensional (stochastic) differential equations that model the dynamics of molecular systems. Often, these dynamics concentrate near low-dimensional manifolds and have transitions (sadddle points with a single unstable direction) between metastable equilibria We employ iteratively sampled data and isoclines to locate these saddle points. Coupling a black-box sampling scheme (e.g., Markov chain Monte Carlo) with manifold learning techniques (diffusion maps in the case presented here), we show that our method reliably locates equilibria of $X$.