 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActuation space reduction to facilitate insightful shape matching in a novel reconfigurable tendon driven continuum manipulator
Apr 14, 2026In tendon driven continuum manipulators (TDCMs), reconfiguring the tendon routing enables tailored spatial deformation of the backbone. This work presents a design in which tendons can be rerouted either prior to or after actuation by actively rotating the individual spacer disks. Each disk rotation thus adds a degree of freedom to the actuation space, complicating the mapping from a desired backbone curve to the corresponding actuator inputs. However, when the backbone shape is projected into an intermediate space defined by curvature and torsion (C-T), patterns emerge that highlight which disks are most influential in achieving a global shape. This insight enables a simplified, sequential shape-matching strategy: first, the proximal and intermediate disks are rotated to approximate the global shape; then, the distal disks are adjusted to fine-tune the end-effector position with minimal impact on the overall shape. The proposed actuation framework offers a model-free alternative to conventional control approaches, bypassing the complexities of modeling reconfigurable TDCMs.
Reverse Annealing for Nonnegative/Binary Matrix Factorization
Jul 10, 2020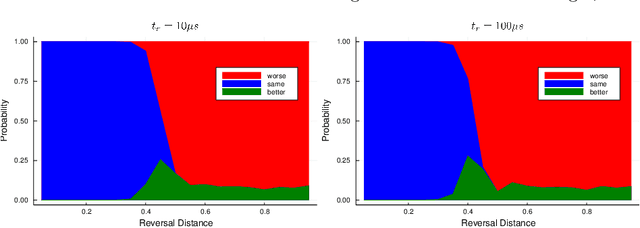
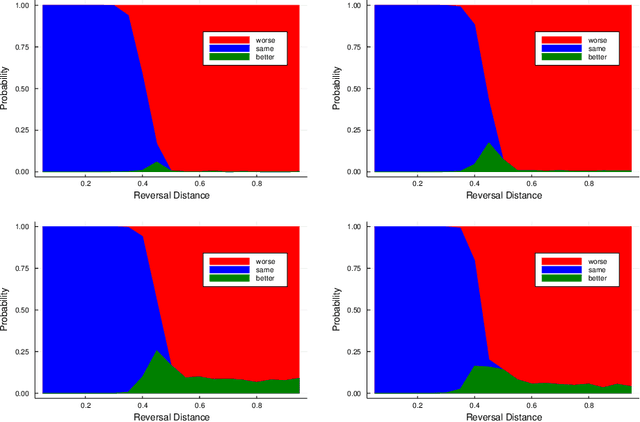
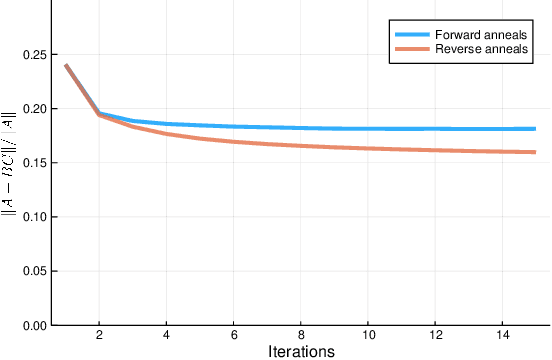
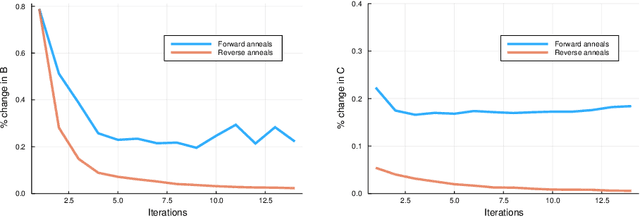
It was recently shown that quantum annealing can be used as an effective, fast subroutine in certain types of matrix factorization algorithms. The quantum annealing algorithm performed best for quick, approximate answers, but performance rapidly plateaued. In this paper, we utilize reverse annealing instead of forward annealing in the quantum annealing subroutine for nonnegative/binary matrix factorization problems. After an initial global search with forward annealing, reverse annealing performs a series of local searches that refine existing solutions. The combination of forward and reverse annealing significantly improves performance compared to forward annealing alone for all but the shortest run times.