 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic NeRF: A Review
May 14, 2024Neural Radiance Field(NeRF) is an novel implicit method to achieve the 3D reconstruction and representation with a high resolution. After the first research of NeRF is proposed, NeRF has gained a robust developing power and is booming in the 3D modeling, representation and reconstruction areas. However the first and most of the followed research projects based on NeRF is static, which are weak in the practical applications. Therefore, more researcher are interested and focused on the study of dynamic NeRF that is more feasible and useful in practical applications or situations. Compared with the static NeRF, implementing the Dynamic NeRF is more difficult and complex. But Dynamic is more potential in the future even is the basic of Editable NeRF. In this review, we made a detailed and abundant statement for the development and important implementation principles of Dynamci NeRF. The analysis of main principle and development of Dynamic NeRF is from 2021 to 2023, including the most of the Dynamic NeRF projects. What is more, with colorful and novel special designed figures and table, We also made a detailed comparison and analysis of different features of various of Dynamic. Besides, we analyzed and discussed the key methods to implement a Dynamic NeRF. The volume of the reference papers is large. The statements and comparisons are multidimensional. With a reading of this review, the whole development history and most of the main design method or principles of Dynamic NeRF can be easy understood and gained.
Robot Detection System 3: LRF groups and Coordinate System
May 11, 2024Front-following is more technically difficult to implement than the other two human following technologies, but front-following technology is more practical and can be applied in more areas to solve more practical problems. In this paper, we will analyze the detailed design of LRF groups, the structure and combination design of coordinate system of Robot Detection System. We use enough beautiful figures to display our novel design idea. Our research result is open source in 2018, and this paper is just to expand the research result propagation granularity. Abundant magic design idea are included in this paper, more idea and analyzing can sear and see other paper naming with a start of Robot Design System with Jinwei Lin, the only author of this series papers.
Robot Detection System 2: Design of Sensor System
May 11, 2024



Front-following is more technically difficult to implement than the other two human following technologies, but front-following technology is more practical and can be applied in more areas to solve more practical problems. The design of sensors structure is an important part of robot detection system. In this paper, we will discuss basic and significant principles and general design idea of sensor system design of robot detction system. Besides, various of novel and special useful methods will be presented and provided. We use enough beautiful figures to display our novel design idea. Our research result is open source in 2018, and this paper is just to expand the research result propagation granularity. Abundant magic design idea are included in this paper, more idea and analyzing can sear and see other paper naming with a start of Robot Design System with Jinwei Lin, the only author of this series papers.
Robot Detection System 1: Front-Following
May 11, 2024Front-following is more technically difficult to implement than the other two human following technologies, but front-following technology is more practical and can be applied in more areas to solve more practical problems. Front-following technology has many advantages not found in back-following and side-by-side technologies. In this paper, we will discuss basic and significant principles and general design idea of this technology. Besides, various of novel and special useful methods will be presented and provided. We use enough beautiful figures to display our novel design idea. Our research result is open source in 2018, and this paper is just to expand the research result propagation granularity. Abundant magic design idea are included in this paper, more idea and analyzing can sear and see other paper naming with a start of Robot Design System with Jinwei Lin, the only author of this series papers.
LIVE: LaTex Interactive Visual Editing
May 10, 2024LaTex coding is one of the main methods of writing an academic paper. When writing a paper, abundant proper visual or graphic components will represent more information volume than the textual data. However, most of the implementation of LaTex graphic items are designed as static items that have some weaknesses in representing more informative figures or tables with an interactive reading experience. To address this problem, we propose LIVE, a novel design methods idea to design interactive LaTex graphic items. To make a lucid representation of the main idea of LIVE, we designed several novels representing implementations that are interactive and enough explanation for the basic level principles. Using LIVE can design more graphic items, which we call the Gitems, and easily and automatically get the relationship of the mutual application of a specific range of papers, which will add more vitality and performance factors into writing of traditional papers especially the review papers. For vividly representing the functions of LIVE, we use the papers from NeRF as the example reference papers. The code of the implementation project is open source.
I3DGS: Improve 3D Gaussian Splatting from Multiple Dimensions
May 10, 20243D Gaussian Splatting is a novel method for 3D view synthesis, which can gain an implicit neural learning rendering result than the traditional neural rendering technology but keep the more high-definition fast rendering speed. But it is still difficult to achieve a fast enough efficiency on 3D Gaussian Splatting for the practical applications. To Address this issue, we propose the I3DS, a synthetic model performance improvement evaluation solution and experiments test. From multiple and important levels or dimensions of the original 3D Gaussian Splatting, we made more than two thousand various kinds of experiments to test how the selected different items and components can make an impact on the training efficiency of the 3D Gaussian Splatting model. In this paper, we will share abundant and meaningful experiences and methods about how to improve the training, performance and the impacts caused by different items of the model. A special but normal Integer compression in base 95 and a floating-point compression in base 94 with ASCII encoding and decoding mechanism is presented. Many real and effective experiments and test results or phenomena will be recorded. After a series of reasonable fine-tuning, I3DS can gain excellent performance improvements than the previous one. The project code is available as open source.
OneTo3D: One Image to Re-editable Dynamic 3D Model and Video Generation
May 10, 2024One image to editable dynamic 3D model and video generation is novel direction and change in the research area of single image to 3D representation or 3D reconstruction of image. Gaussian Splatting has demonstrated its advantages in implicit 3D reconstruction, compared with the original Neural Radiance Fields. As the rapid development of technologies and principles, people tried to used the Stable Diffusion models to generate targeted models with text instructions. However, using the normal implicit machine learning methods is hard to gain the precise motions and actions control, further more, it is difficult to generate a long content and semantic continuous 3D video. To address this issue, we propose the OneTo3D, a method and theory to used one single image to generate the editable 3D model and generate the targeted semantic continuous time-unlimited 3D video. We used a normal basic Gaussian Splatting model to generate the 3D model from a single image, which requires less volume of video memory and computer calculation ability. Subsequently, we designed an automatic generation and self-adaptive binding mechanism for the object armature. Combined with the re-editable motions and actions analyzing and controlling algorithm we proposed, we can achieve a better performance than the SOTA projects in the area of building the 3D model precise motions and actions control, and generating a stable semantic continuous time-unlimited 3D video with the input text instructions. Here we will analyze the detailed implementation methods and theories analyses. Relative comparisons and conclusions will be presented. The project code is open source.
MultiStream: A Simple and Fast Multiple Cameras Visual Monitor and Directly Streaming
Jul 13, 2022
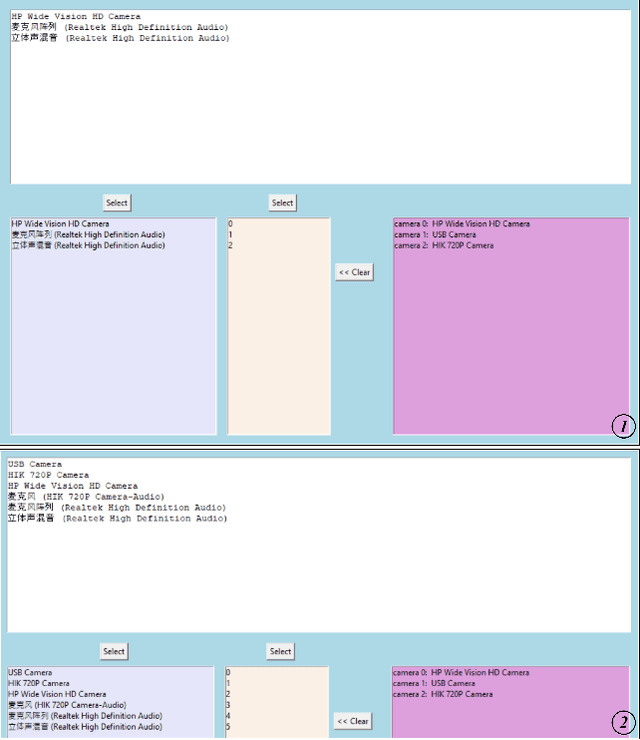
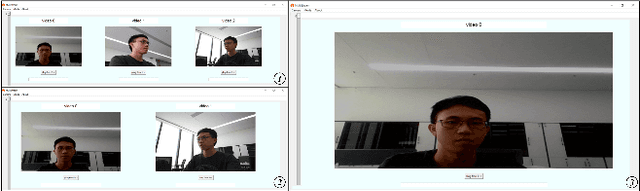
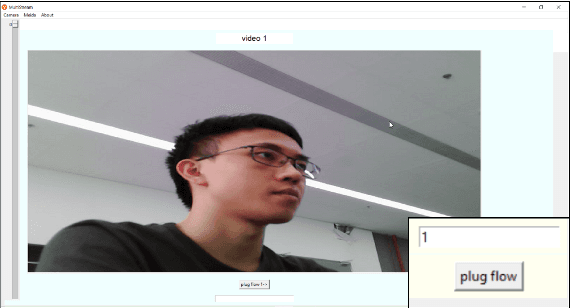
Monitoring and streaming is one of the most important applications for the real time cameras. The research of this has provided a novel design idea that uses the FFmpeg and Tkinter, combining with the libraries: OpenCV and PIL to develop a simple but fast streaming toolkit MultiSteam that can achieve the function of visible monitoring streaming for multiple simultaneously. MultiStream is able to automatically arrange the layout of the displays of multiple camera windows and intelligently analyze the input streaming URL to select the correct corresponding streaming communication protocol. Multiple cameras can be streamed with different communication protocols or the same protocol. Besides, the paper has tested the different streaming speeds for different protocols in camera streaming. MultiStream is able to gain the information of media equipment on the computer. The configuration information for media-id selection and multiple cameras streaming can be saved as json files.
Multi-area Target Individual Detection with Free Drawing on Video
Jul 06, 2022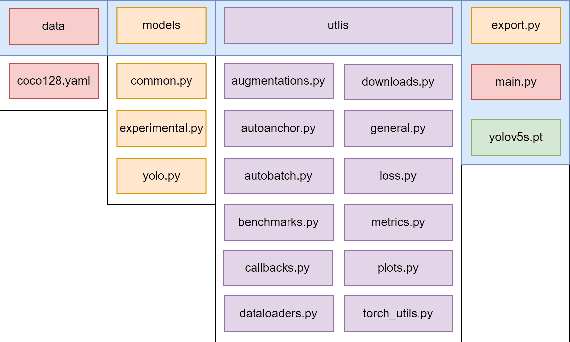
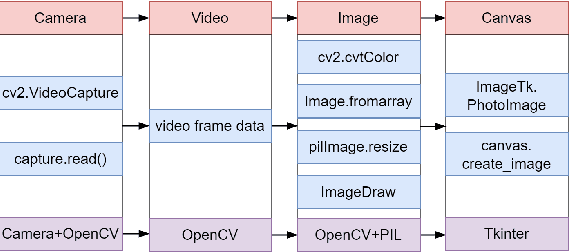
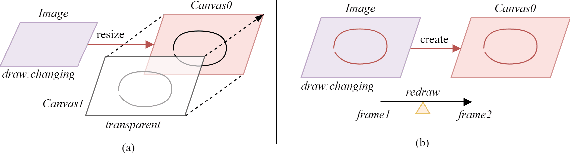
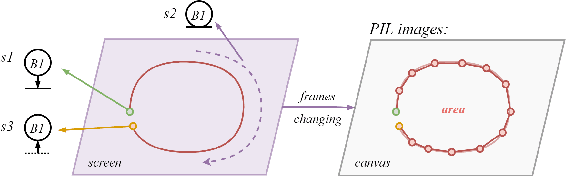
This paper has provided a novel design idea and some implementation methods to make a real time detection of multi-areas with multiple detecting areas that are generated by the real time drawing on the screen display of the video. The drawing on the video will remain the output as polylines, and the colors of the outlines will change when the stage of drawing or detecting is changed. The shape of the drawn area is free to be customized and real-time effective. The configuration of the drawn areas can be renewed and the detecting areas are working individually. The detection result should be shown with a GUI designed by Tkinter. The object recognition model was developed on YOLOv5 but can be changed to others, which means the core design and implementation idea of this paper is model-independent. With PIL and OpenCV and Tkinter, the drawing effect is real time and efficient. The design and code of this research is basic and can be extended to be implemented in numerous monitoring and detecting situations.