 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Predictive Dynamics for Generalization of Vision-based Reinforcement Learning
Jun 05, 2025Vision-based reinforcement learning requires efficient and robust representations of image-based observations, especially when the images contain distracting (task-irrelevant) elements such as shadows, clouds, and light. It becomes more important if those distractions are not exposed during training. We design a Self-Predictive Dynamics (SPD) method to extract task-relevant features efficiently, even in unseen observations after training. SPD uses weak and strong augmentations in parallel, and learns representations by predicting inverse and forward transitions across the two-way augmented versions. In a set of MuJoCo visual control tasks and an autonomous driving task (CARLA), SPD outperforms previous studies in complex observations, and significantly improves the generalization performance for unseen observations. Our code is available at https://github.com/unigary/SPD.
Dream to Generalize: Zero-Shot Model-Based Reinforcement Learning for Unseen Visual Distractions
Jun 05, 2025



Model-based reinforcement learning (MBRL) has been used to efficiently solve vision-based control tasks in highdimensional image observations. Although recent MBRL algorithms perform well in trained observations, they fail when faced with visual distractions in observations. These task-irrelevant distractions (e.g., clouds, shadows, and light) may be constantly present in real-world scenarios. In this study, we propose a novel self-supervised method, Dream to Generalize (Dr. G), for zero-shot MBRL. Dr. G trains its encoder and world model with dual contrastive learning which efficiently captures task-relevant features among multi-view data augmentations. We also introduce a recurrent state inverse dynamics model that helps the world model to better understand the temporal structure. The proposed methods can enhance the robustness of the world model against visual distractions. To evaluate the generalization performance, we first train Dr. G on simple backgrounds and then test it on complex natural video backgrounds in the DeepMind Control suite, and the randomizing environments in Robosuite. Dr. G yields a performance improvement of 117% and 14% over prior works, respectively. Our code is open-sourced and available at https://github.com/JeongsooHa/DrG.git
DeepSoCS: A Neural Scheduler for Heterogeneous System-on-Chip (SoC) Resource Scheduling
Jun 05, 2020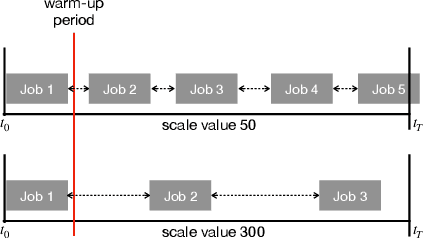
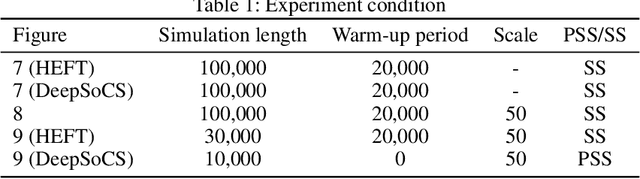
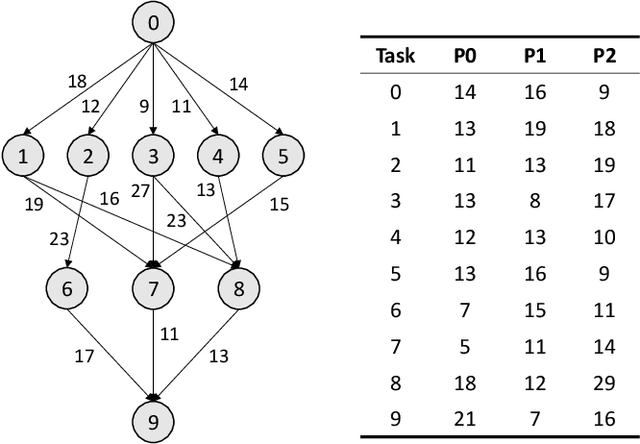
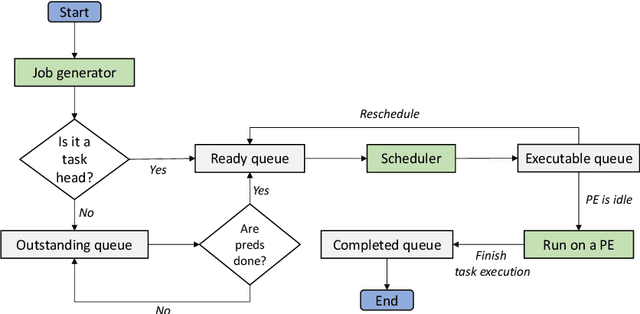
In this paper, we~present a novel scheduling solution for a class of System-on-Chip (SoC) systems where heterogeneous chip resources (DSP, FPGA, GPU, etc.) must be efficiently scheduled for continuously arriving hierarchical jobs with their tasks represented by a directed acyclic graph. Traditionally, heuristic algorithms have been widely used for many resource scheduling domains, and Heterogeneous Earliest Finish Time (HEFT) has been a dominating state-of-the-art technique across a broad range of heterogeneous resource scheduling domains over many years. Despite their long-standing popularity, HEFT-like algorithms are known to be vulnerable to a small amount of noise added to the environment. Our Deep Reinforcement Learning (DRL)-based SoC Scheduler (DeepSoCS), capable of learning the "best" task ordering under dynamic environment changes, overcomes the brittleness of rule-based schedulers such as HEFT with significantly higher performance across different types of jobs. We~describe a DeepSoCS design process using a real-time heterogeneous SoC scheduling emulator, discuss major challenges, and present two novel neural network design features that lead to outperforming HEFT: (i) hierarchical job- and task-graph embedding; and (ii) efficient use of real-time task information in the state space. Furthermore, we~introduce effective techniques to address two fundamental challenges present in our environment: delayed consequences and joint actions. Through an extensive simulation study, we~show that our DeepSoCS exhibits the significantly higher performance of job execution time than that of HEFT with a higher level of robustness under realistic noise conditions. We~conclude with a discussion of the potential improvements for our DeepSoCS neural scheduler.