 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTaming the Panda with Python: A Powerful Duo for Seamless Robotics Programming and Integration
Jul 14, 2023Franka Emika robots have gained significant popularity in research and education due to their exceptional versatility and advanced capabilities. This work introduces panda-py - a Python interface and framework designed to empower Franka Emika robotics with accessible and efficient programming. The panda-py interface enhances the usability of Franka Emika robots, enabling researchers and educators to interact with them more effectively. By leveraging Python's simplicity and readability, users can quickly grasp the necessary programming concepts for robot control and manipulation. Moreover, integrating panda-py with other widely used Python packages in domains such as computer vision and machine learning amplifies the robot's capabilities. Researchers can seamlessly leverage the vast ecosystem of Python libraries, thereby enabling advanced perception, decision-making, and control functionalities. This compatibility facilitates the efficient development of sophisticated robotic applications, integrating state-of-the-art techniques from diverse domains without the added complexity of ROS.
Optimizing Passenger Comfort in Cost Functions for Trajectory Planning
Nov 16, 2018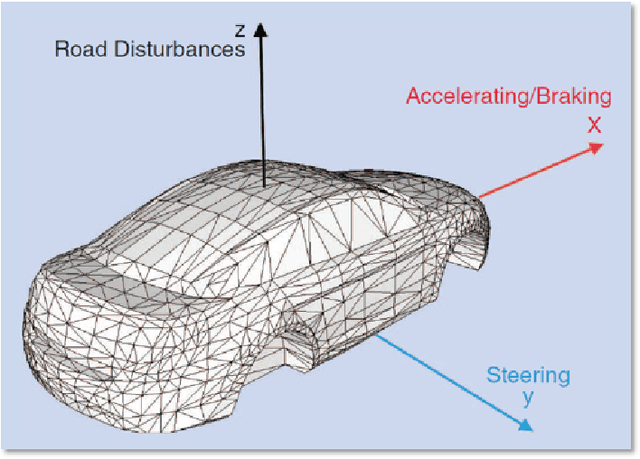
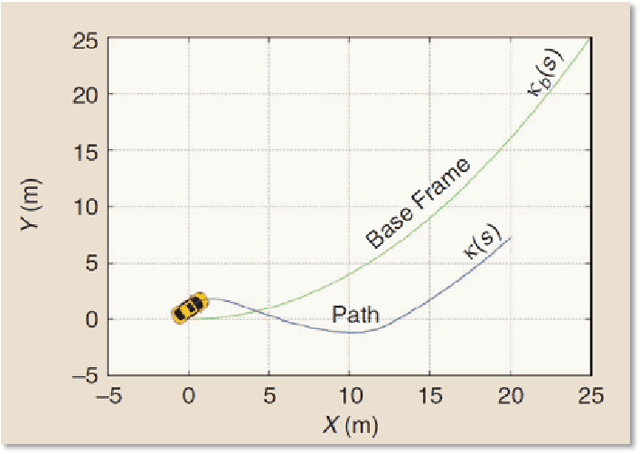
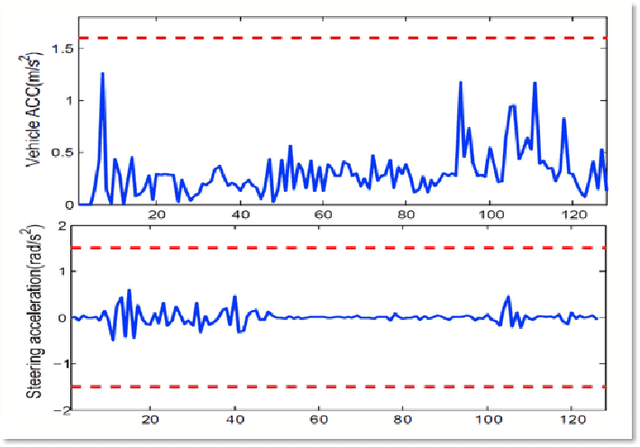
Current advances in the development of autonomous cars suggest that driverless cars may see wide-scale deployment in the near future. Research by both industry and academia is driven by potential benefits of this new technology, including reductions in fatalities and improvements in traffic and fuel efficiency as well as greater mobility for people who will or cannot drive cars themselves. A deciding factor for the adoption of self-driving cars besides safety will be the comfort of the passengers. This report looks at cost functions currently used in motion planning methods for autonomous on-road driving. Specifically, how the human perception of how comfortable a trajectory is can be formulated within cost functions.